Johnny 5
Replica del robot Johnny 5, protagonista dei film “Cortocircuito” del 1986 e “Cortocircuito 2” del 1988.
09/06/2016

Vi presento la mia ultima creazione: una replica del robot Johnny 5, protagonista dei film “Cortocircuito” del 1986 e “Cortocircuito 2” del 1988.
Non sono dei film trasmessi molto spesso in televisione, dunque molti non li conoscono neppure, ma a me quel robot è piaciuto particolarmente per la sua dinamica ed espressività, dunque ho deciso di farmene uno (a modo mio).
La costruzione del Johnny 5 cinematografico ha richiesto un lavoro notevole di meccanica ed elettronica e considerato il periodo storico è stato anche molto innovativo e sofisticato.
Sembra che la sua realizzazione sia costata sul milione di dollari (degli anni 80), in realtà si trattava di più esemplari con funzioni diverse.
Per altre info sui film clicca QUI ,mentre QUI troverete le immagini del robot originale.
Non avendo in tasca un paio di milioni di euro (di oggi, adeguati all’inflazione) ho dovuto arrangiarmi in altri modi.
Anzi, nel solito modo: utilizzando rifiuti, residuati, reperti di laboratorio e ciarpame vario.
Ho riutilizzato varie parti disponibili nel mio laboratorio e ho anche saccheggiato roba funzionante, come il mitico "Carodel" (sigh!) .
Nonostante il materiale "povero" usato per la costruzione, il risultato è quasi piacevole (almeno secondo me).
Diversi componenti li ho trovati alla solita eco discarica, come i trapani a batteria (buttati ancora funzionanti).
Poi ho usato anche: protezioni di policarbonato per tubi neon, espositori di Chupa chups, plafoniere dismesse, tela nautica, ruote di carrelli della spesa, pannelli in forex e molto altro, rigorosamente di scarto.
Spese per acquisti di nuovo materiale: circa 70 euro.
Dopo aver cercato in rete senza successo qualche disegno del robot originale, sono stato costretto ad “inventarmelo” studiando le foto disponibili su internet ed analizzando i dettagli visionando varie volte i due film.
I cingoli
In commercio non si trova assolutamente nulla di adatto, salvo qualche cingoletto componibile per robot giocattolo “line follower”, ma a me serviva qualcosa dieci volte più grande, perciò ho dovuto costruirmi tutti gli elementi partendo dalle materie prime, che in questo caso sono stati: catene e pignoni di bicicletta, profilati e piattina in alluminio, rivetti e fogli in plastica per pavimenti. Molte parti le ho realizzate appositamente con la mia stampante 3D Stratos.
Ecco i componenti:

Elementi della catena, scomposta in pezzi da tre maglie, usati per l'assemblaggio dei cingoli.

I cingoli prendono forma.

Qui possiamo vedere come sono composti.
I perni sporgenti sono stati poi tagliati con la "flex".
Dopo qualche settimana di lavoro ho ottenuto quello che si vede in foto:

I primi test dinamici hanno dimostrato che questa architettura NON funzionava bene: le corone non ingranavano adeguatamente alla catena e spesso uscivano dalla sede bloccando il cingolo. Inoltre il movimento era rumoroso e creava parecchie vibrazioni. Cambio strategia, disegno e stampo delle pulegge con la mia fida Stratos , che ha lavorato ininterrottamente per tre giorni stampando le 20 semipulegge e le due corone dentate visibili in foto.
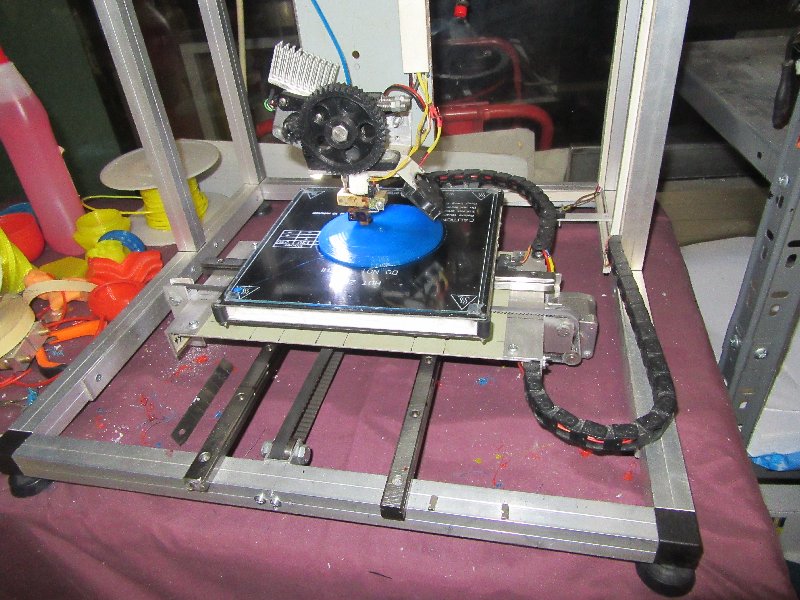
La 3D printer Stratos al lavoro, mentre stampa una delle semipulegge.
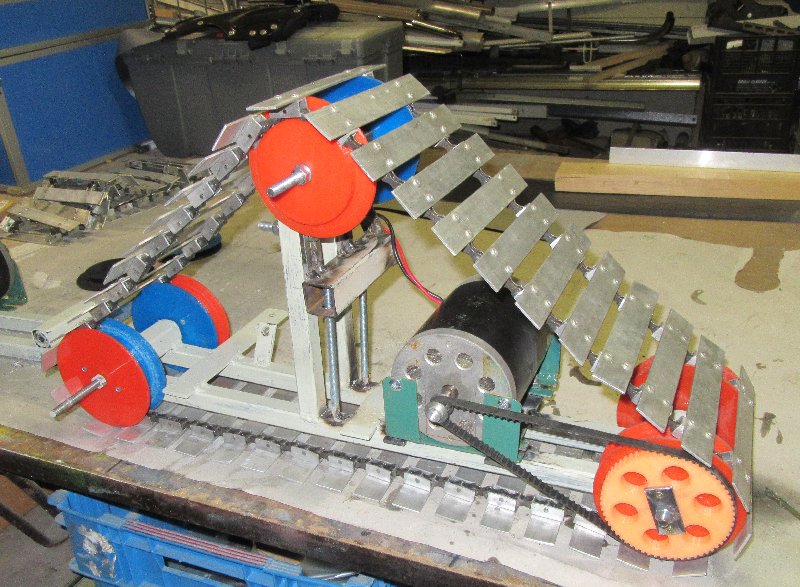
Montaggio dei nuovi motori e della trasmissione a cinghia.
Cambio anche i motori, cannibalizzando quelli montati sul “Carodel”: due bei motori in CC a 24V da 350W di potenza. Il controller dei motori è lo stesso utilizzato sul "Carodel", ovvero un Sabertooth da 2X32 Ampere connesso al ricevitore di un radiocomando Futaba a 6 canali.
Questa volta il tutto sembra funzionare e anche la rumorosità e le vibrazioni sono diminuite.
La trasmissione è fatta con una cinghia dentata-puleggia in alluminio-corona in ABS, stampata ancora con la Stratos, il rapporto di riduzione è di 1:12.
Applico sui cingoli un rivestimento di plastica per diminuire l’attrito e la rumorosità, agevolando le curve sulle superfici rugose come asfalto e cemento.
Il telaio
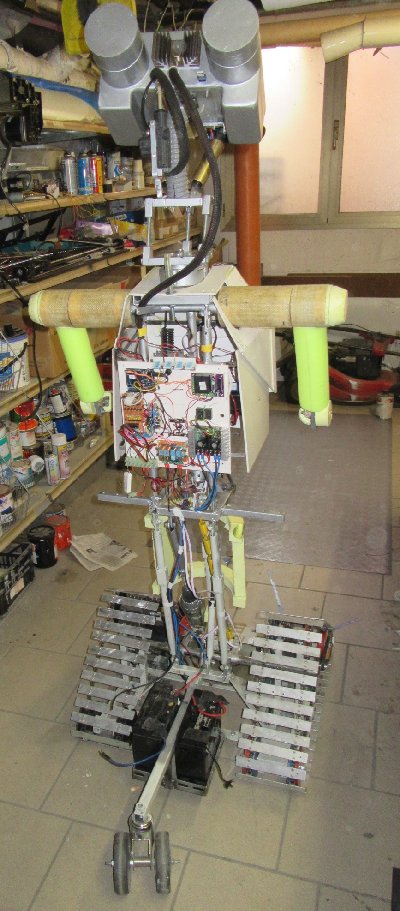
Ora posso continuare con gli altri elementi della struttura. Il robot originale aveva due tronchi snodati ed era in grado di alzarsi ed abbassarsi conservando la planarità della testa e delle braccia. Più facile a dirsi che a farsi, come in effetti me ne sono accorto in seguito. Ho costruito una struttura a doppio parallelogramma, motorizzato con motoriduttori da trapani a batteria, barre filettate e delle molle che l’aiutavano a sostenere il peso per non forzare troppo i motori. Il tutto funzionava anche se le complicazioni le ho scoperte al momento di rivestire la struttura. Il cinematismo era talmente complesso che un semplice rivestimento con pannelli di forex risultava impossibile da realizzare. Sono ricorso a dei compromessi, come si vede da queste foto e dai video seguenti.

Il telaio a doppio parallelogramma.
Considerata la complessità della struttura, sono a
disposizione per chiarimenti a chi ne fosse interessato.

Lo schienale con l'equipaggiamento di controllo.
In basso tra i cingoli, le due batterie da 12V 18Ah

Particolare dello snodo della testa.La motorizzazione è stata fatta
con un motoriduttore recuperato da un triciclo elettrico rottamato.
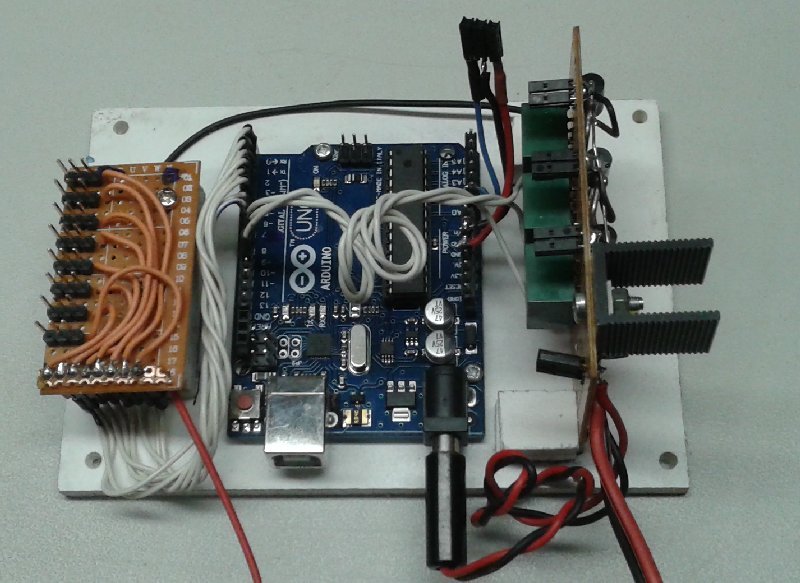
L’elettronica l’ho installata sul pannello posteriore, chiuso da un apposito coperchio apribile a cerniera.
Troviamo il ricevitore del radiocomando digitale a 2,4 Ghz, un ricevitore per apricancello a 433 Mhz a 4 canali, un doppio regolatore per i motori dei cingoli (precedentemente installato sul “Carodel”), un Arduino Uno, un’interfaccia buffer a 12 canali e una serie di relè per i vari motori. Il tutto interconnesso da un'accozzaglia di cavi assortiti.
Perché non ho usato ponti ad H a mosfet, e simili raffinatezze? Semplice, li avevo già pronti e collaudati e non avevo molto tempo per allestire soluzioni più sofisticate. Tanto tutto ha funzionato con una buona affidabilità. Non vi annoierò con la descrizione di questa semplice scheda assemblata su millefori perché schemi simili ne trovate a vagonate in rete, come ad esempio questa:

Le funzioni sono quelle di driver di potenza per i motori in continua per il sollevamento dei due tronchi, la rotazione della testa, delle braccia, l'accensione del laser ed eventuali espansioni future.Il software di controllo per Arduino è disponibile QUI, e nel file troverete molte note per facilitarne la comprensione.
Il funzionamento è il seguente: All'accensione il software rimane in attesa di un comando proveniente dal radiocomando UHF a 4 canali.
Appena riceve il consenso inizia una sequenza preprogrammata che fa alzare ed abbassare il telaio, sposta la testa a destra e sinistra e via così per alcuni minuti. Poi rimane in stand-by in attesa di un altro input per poi ricominciare tutto da capo.
Tutti i movimenti sono asserviti da microswitch di fine corsa per evitare il rischio di danneggiare la meccanica o i motori.
Con un altro segnale proveniente da un diverso tasto del radiocomando, il software esegue un sollevamento o poi un abbassamento completo del telaio, questo per poter ridurre le dimensioni d'ingombro del robot per poterlo caricare sul furgone. Nonostante questo è necessario smontare ogni volta la testa e il laser.
Da notarsi che le sequenze automatizzate non prevedono il movimento dei cingoli, operazione troppo pericolosa data la possibile presenza di persone nella sua traiettoria. Per questo motivo i cingoli vengono comandati esclusivamente a vista dall'operatore (io), tramite l'affidabile radiocomando digitale a 2,4 Ghz per aeromodellismo. In origine avevo previsto l'impiego di un sonar a quattro zone realizzato con altrettanti metri digitali SR04 ma non ho fatto in tempo ad installarli. Sarà fatto nel prossimo aggiornamento.
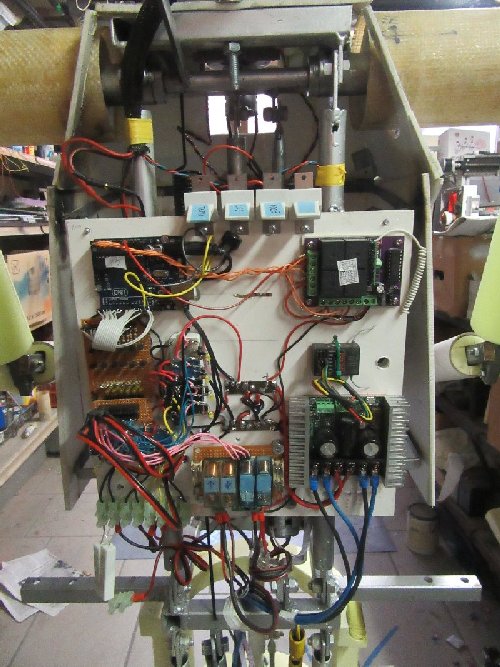
Qui possiamo vedere in dettaglio delle schede di controllo.
La testa
Passiamo alla testa, il componente che mi è interessato perfezionare maggiormente. Per la costruzione ho usato tubi in PVC per scarichi domestici, pannelli in Forex (PVC espanso), laminato in fibra di carbonio (per le ciglia), profili in alluminio e tutto quello che mi capitava sottomano.
Il risultato è questo:

Le ciglia, dovendo essere leggerissime e resistenti, sono state laminate
con fibra di carbonio ad un solo strato, con spessore di 2/10 di millimetro.
Il "cervello" di Johnny 5, un arduino e una schedina "hub" per il collegamento dei servocomandi.
A destra l'interfaccia a mosfet per il comando dei led.


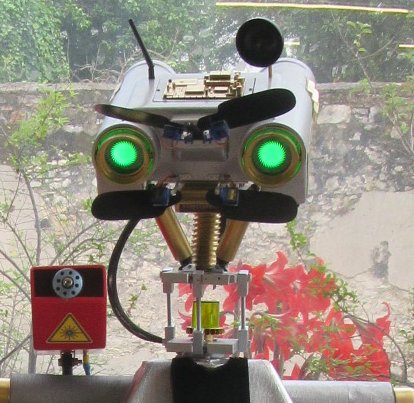
La testa di Johnny 5 e a sinistra il laser, dotato di un puntatore
DPSS a luce verde con il fascio splittato da un filtro in modo da
proiettare migliaia di puntini luminosi (per questioni di sicurezza)
All'interno troviamo: sei servocomandi per le "ciglia e sopracciglia", altri due per il movimenti degli obiettivi, due serie di led rossi, due serie di led bianchi ed infine due serie di led verdi, tutti installati su pannelli circolari messi dietro gli obiettivi traslucidi, con lo scopo di accendere gli occhi con diversi colori, il tutto controllato dall'onnipresente Arduino UNO.
Ho scritto un programma che comandasse i servomotori e i led in modo da sincronizzare le espressioni con i dialoghi audio.
Il risultato è stato piuttosto realistico, Johnny 5 offre numerose espressioni, tra cui felicità, perplessità, curiosità, noia, sorpresa, stanchezza e per finire l'incazzatura. Il tutto sincronizzato con la tonalità di colore degli occhi (rossi quand'è arrabbiato).
Qui sotto è possibile vedere un video di due minuti e mezzo con i risultati ottenuti. Per apprezzarlo nei dettagli consiglio di visualizzarlo direttamente su YouTube cliccando sull'apposita icona.
Il programma per arduino lo trovate QUI, ma ricordate di verificare l'installazione della libreria SERVO, normalmente già installata nella distribuzione di Arduino. Non credo sia indispensabile descrivere il programma, dentro ci trovere molti commenti esplicativi e penso sia abbastanza chiaro anche ai non esperti.
Vocalizzazioni Audio
L'audio è stato registrato con la mia voce, successivamente taroccata con il programma MorphVox Pro e montata/filtrata/sincronizzata/MP3izzata con Audacity e poi copiata su una schedina SD. La riproduzione avviene con un lettore di MP3 per auto, sonorizzato da un altoparlante corredato di un amplificatore BF da 3W. Tralascio i dettagli perché sono facilmente reperibili ovunque. Facendo partire contemporaneamente l'arduino della testa e il player, la sincronizzazione è molto precisa, l'atteggiamento visuale rispecchia le frasi pronunciate, il tutto dura circa 8 minuti per poi ripartire da capo.
Per la cronaca, oltre alle frasi originali tratte dai film, il robot racconta anche barzellette per bambini e qualche altra scemenza assortita.
Ecco il file audio con i dialoghi in sequenza: file audio in formato MP3
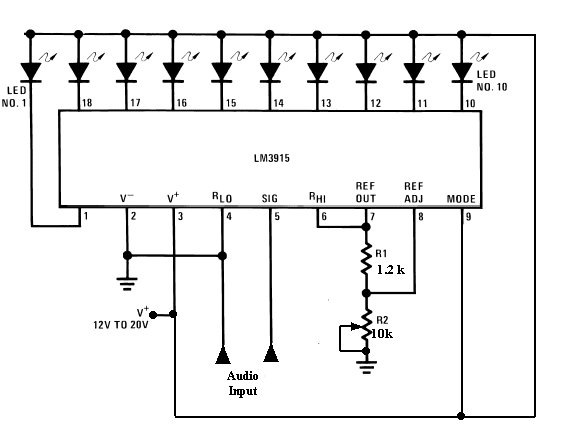
In basso, in prossimità della bocca, ho messo una barra a 10+10 led verdi pilotata con il classico integrato per VU meter LM3915. Essendo connesso all'uscita dell'amplificatore ha lo scopo di illuminarsi per dare l'impressione di muovere la bocca, come il robot originale.
Lo schema è il solito circuito visto e stravisto in rete, oltretutto l'ho assemblato al volo su una millefori.
Nel mio caso i venti led sono stati collegati in parallelo a due a due, in modo da creare una simmetria.
Caratteristiche tecniche:
Struttura in profilati metallici saldati ad arco
Altezza massima: 185 cm
Altezza minima (con i tronchi piegati) 145 cm
Peso in ordine di marcia, completo di batterie: 90 Kg.
Velocità massima: passo d'uomo (4/5 Kmh)
Pendenza massima superabile: 15 gradi (oltre si ribalta)
Alimentazione: due accumulatori Pb/gel a 12V 18 Ah
Autonomia: in funzione degli spostamenti effettuati
Strumentazione di bordo: doppio voltmetro e amperometro
Regolatori di tensione a 12V e 5V, con due LM317K
Motori per i cingoli: 2 motori in CC a 24V 350W
Motori di sollevamento: 2 motoriduttori epicicloidali in CC (ex trapani avvitatori a batteria)
Controllo remoto con un radiocomando omologato a 6 canali FUTABA per i cingoli e un radiocomando per cancelli a 433 Mhz, 4 canali per l'attivazione delle funzioni ausiliarie.
Sollevamento testa: Attuatore per apriportiere a 12V
Movimentazione ciglia: 6 miniservi da aeromodellismo
Movimentazione occhi: 2 miniservi da aeromodellismo
Movimentazione braccia e pinze: previste ma non ancora implementate
Attivazione illuminazione led degli occhi: 3 mosfet da 5 Ampere
Fotogallery

.jpg)
.jpg)
.jpg)