"El Carodel", veicolo elettrico a due ruote autostabilizzante
che da grande vuole diventare un Segway...
02/05/2015
In dialettto locale "carodel" significa "carretto scalcinato", nome immediatamente affibbiatogli da un tizio che mi ha visto durante il primo collaudo: "cossa te fa su quel carodel? ", per citare le sue testuali parole.
Il nome è consono al veicolo che presento in questa pagina, visto che sembra il brutto anatroccolo che "da grande" vuole diventare un Segway.
Dal punto di vista estetico di Segway non c'e' tanto, ma almeno sta in piedi, si muove, ed anche corre e gira, quasi come un vero e costosissimo Segway.
E' attualmente in fase di sviluppo e perfezionamento.

Nonostante la sua natura sperimentale (rudimentale) il coso usa gli stessi principi del veicolo originale, ovvero un sistema di stabilizzazione dotato di accelerometri e giroscopi molto sofisticato.
Vediamo i dettagli costruttivi:
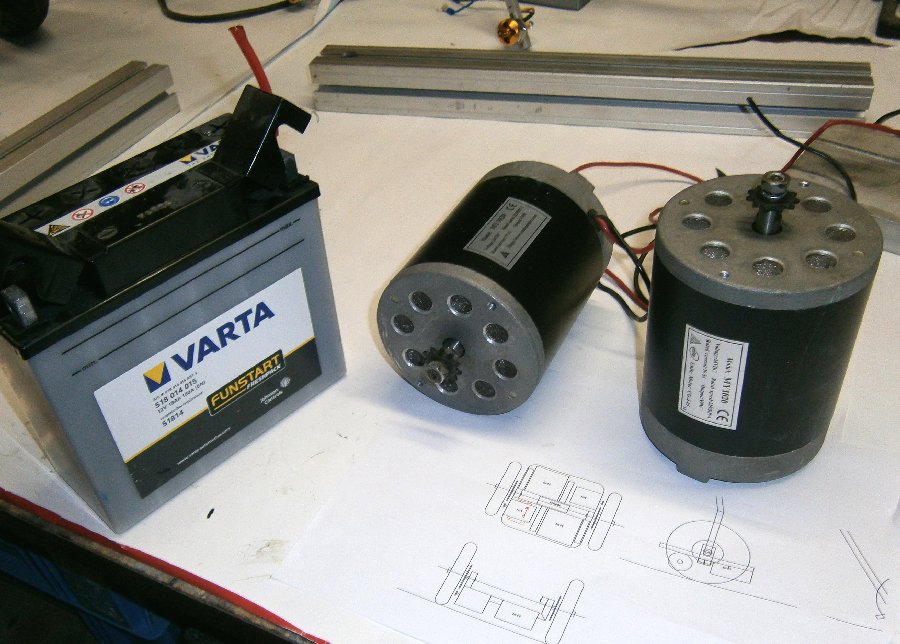
- 2 Motori C/C a 24V 350W
- 2 Accumulatori da 12V 18Ah in serie
- IMU (giroscopio ed accelerometro a 3 assi: MPU6050
- Processore Atmel Mega 2560
- Magnetometro (bussola digitale)
- Pulsante di sicurezza per la disattivazione immediata dei motori in caso di caduta (dead man switch)
- Doppio regolatore di velocità a mosfet Sabertooth da 2X32 Ampere: https://Dimensionengineering
- Ruote da minimoto diametro 400mm, spessore pneumatici 70 mm, cerchi in lega leggera.
- Trasmissione a pignone-catena-corona
- Struttura in profili metallici saldati ad arco
- Manubrio in alluminio dotato di snodi per un facile trasporto (anche nel bagagliaio di un'auto)
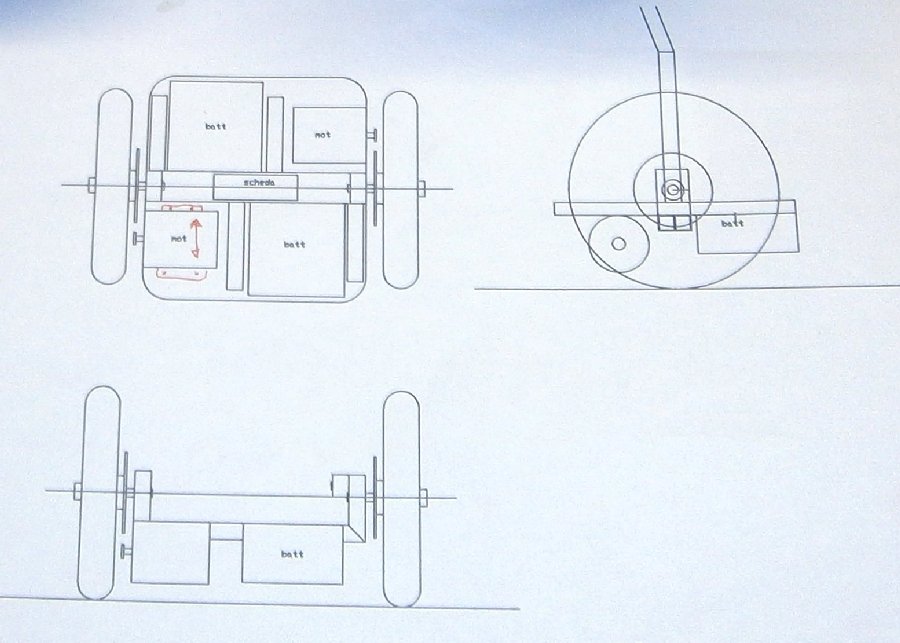
I motori sono stati installati uno davanti e uno dietro all'asse delle ruote, in modo da ottenere una distribuzione ottimale dei pesi.
Gli accumulatori sono stati invece installati sull'asse centrale, perpendicolare alle ruote (il disegno iniziale è stato modificato).
La scheda elettronica è stata montata sulla zona sottostante alla pedana.
Il manubrio è ripiegabile o removibile a seconda delle esigenze, ed è collegato all'elettronica per mezzo di un cavo multipolare dotato di presa a 25 poli.
L'elettronica:
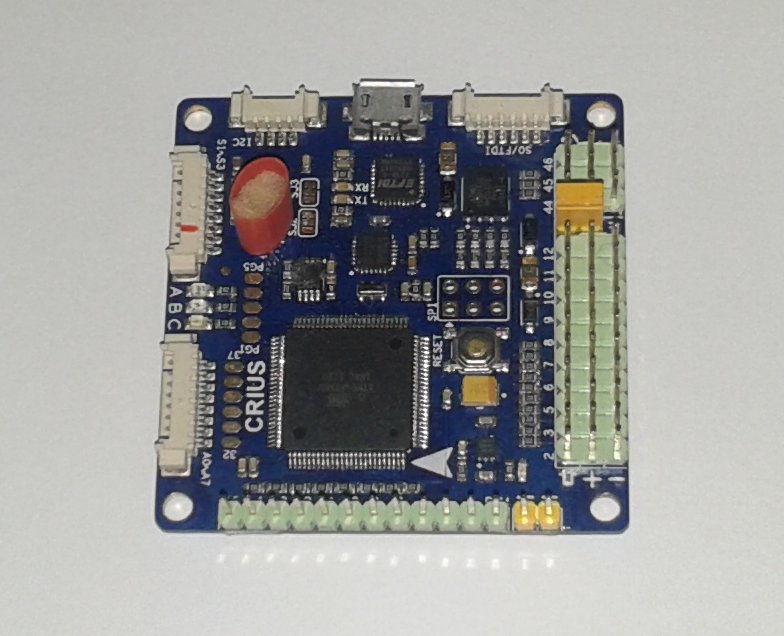
Questa è la scheda di controllo, si tratta di una CRIUS All in One, sicuramente nota agli autocostruttori di multirotori.
L'ho usata perchè ne avevo un paio disponibili in laboratorio, reduce da precedenti esperienze con i multiorotori.
Si tratta di una unità inerziale dotata del diffuso chip MPU6050, che contiene di set di tre accelerometri e di tre giroscopi disposti su tutti e tre gli assi.
Il cuore della scheda è un microntrollore ATMEL ATmega 2560 ed è corredata anche di un magnetometro molto preciso e di un barometro digitale (solitamente usato come altimetro)
Con un adeguato software è in grado di discriminare angoli piccolissimi ed è molto precisa e stabile.
La programmazione è stata fatta in ambiente Arduino, infatti la scheda CRIUS è perfettamente compatibile con questo sistema di sviluppo.
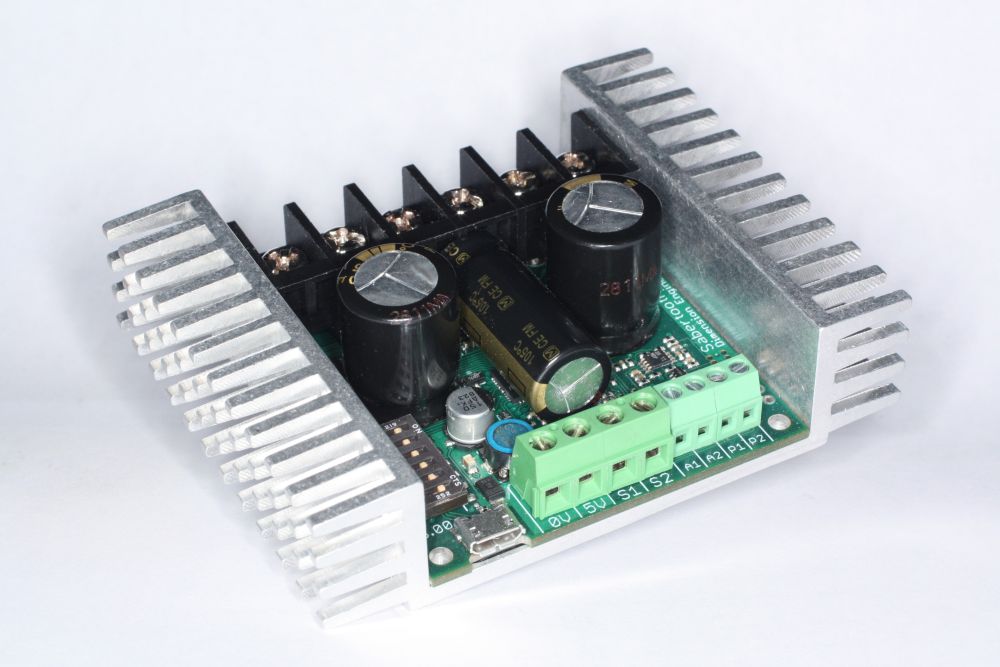
Il controllo motori è stato realizzato con un modulo prodotto da una ditta americana, la Dimension Engineering, dispone di due distinti canali e supporta fino a 32 Ampere per canale.
L'hardware è sostanzialmente un ponte ad H equipaggiato di MOSFET di potenza, opera in PWM ad alta frequenza e l'interfacciamento con la scheda Crius avviene tramite porta seriale.
Una caratteristica molto utile di questo modulo è la capacità di ricaricare gli accumulatori in fase di frenata o quando viene affrontata una discesa, per questo viene definito "autorigenerante".
Nel prototipo è stato usato questo modulo in quanto l'avevo già disponibile in laboratorio. E' però allo studio un controllo di potenza completamente disegnato costruito in proprio.
L'hardware è sostanzialmente un ponte ad H equipaggiato di MOSFET di potenza, opera in PWM ad alta frequenza e l'interfacciamento con la scheda Crius avviene tramite porta seriale.
Una caratteristica molto utile di questo modulo è la capacità di ricaricare gli accumulatori in fase di frenata o quando viene affrontata una discesa, per questo viene definito "autorigenerante".
Nel prototipo è stato usato questo modulo in quanto l'avevo già disponibile in laboratorio. E' però allo studio un controllo di potenza completamente disegnato costruito in proprio.
Qualche foto dei dettagli:

.jpg)




