Polifemo 1k2
un ROV subacqueo per grandi profondita'
08/09/2021
Polifemo 1k2
PROGETTAZIONE E COSTRUZIONE DELL'HARDWARE
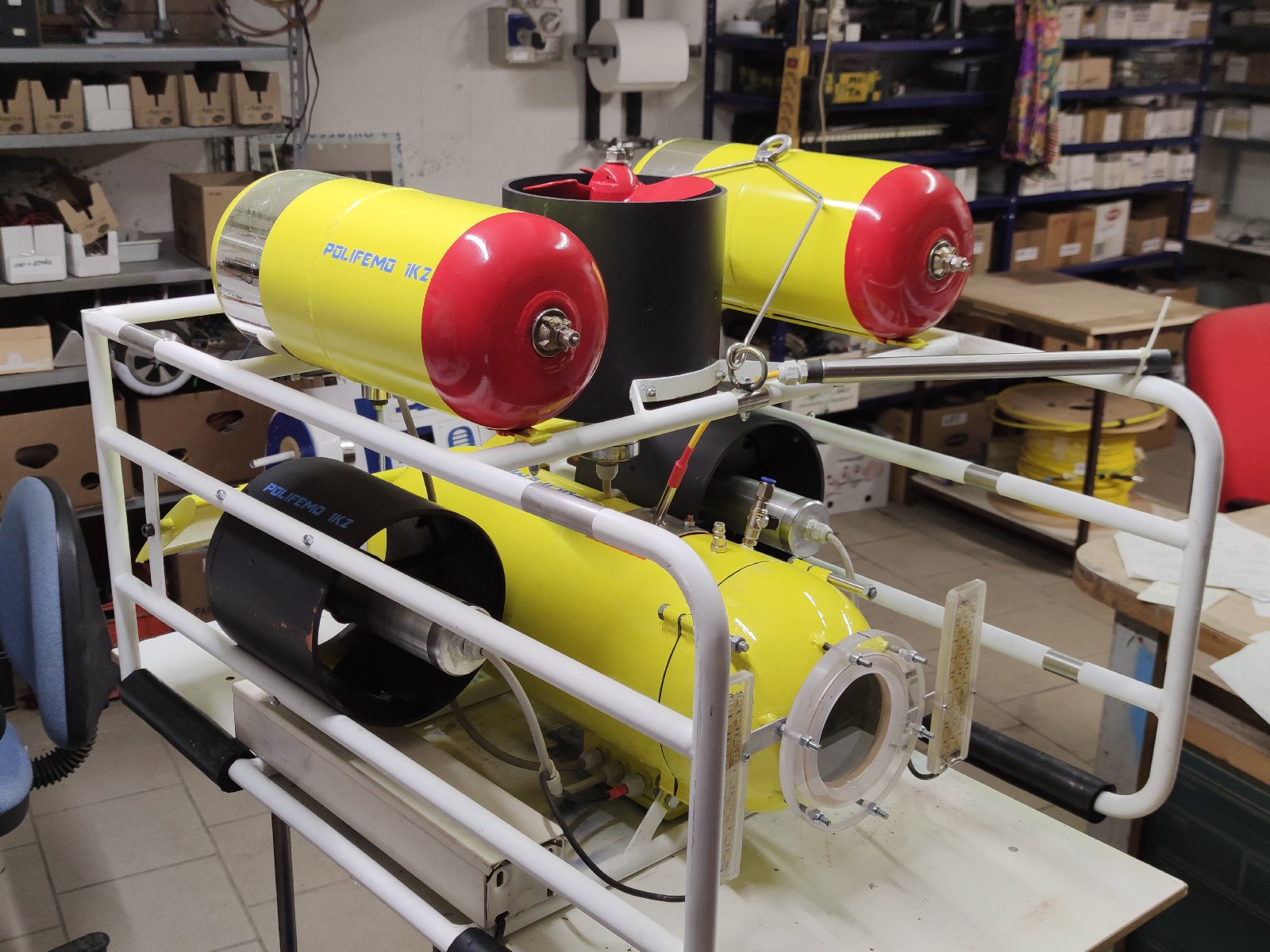
Il ROV Polifemo in fase di allestimento
Prima parte (struttura e hardware)
Negli ultimi mesi mi sono dedicato allo sviluppo di un lavoretto più impegnativo del solito, forse non troppo originale ma sicuramente innovativo sotto molti aspetti.
Si tratta di un ROV (Remotely Operated Vehicle) subacqueo, progettato per grandi profondità, dunque non il solito giocattolo cinese da 30 euro.
Lo scafo è progettato per resistere ad almeno 120 bar (con coefficiente di sicurezza 2), pressione idrostatica che troviamo a ben 1200 metri sott'acqua.
Nei ROV professionali per grandi profondità in realtà viene usato un sistema diverso dallo scafo resistente, si usa al suo posto uno scafo leggero riempito d'olio minerale, che essendo incomprimibile può resistere a pressioni altissime.
A me, l'idea di mettere sott'olio della raffinata elettronica non andava troppo a genio, soprattutto per le mie perplessità relative alle conseguenze sulla telecamera, relè e batterie.
Penso infatti che l'olio vada bene per il tonno, le cipolline e i peperoni, ma non per i microprocessori ecc. Senza considerare i problemi di pulizia in caso di apertura per riparazioni, modifiche o manutenzioni.
Ho deciso così di progettare e realizzare uno scafo in grado di sopportare alte pressioni senza cedere o deformarsi, possibilmente senza dover (o far) costruire qualcosa ad hoc, per definizione costosissimo.
Nel mio magazzino giaceva da almeno 30 anni una bombola da sub, pensionata per scadenza del certificato di omologazione.
Oggi le bombole per diving le fanno in alluminio o materiali compositi, ma 40 anni fa erano in acciaio forgiato per bollitura, senza saldature, che è il caso della mia vecchia bombola:
Marca FABER, capacità 18 litri, fatta in acciaio al cromo-molibdeno spesso circa 8 mm, l'ideale per la mia applicazione.
Dovete sapere che queste bombole venivano periodicamente collaudate riempiendole d'acqua ad una pressione di 350/400 bar, ma in realtà possono resistere anche al doppio.
In questo caso la pressione è inversa, tende a schiacciarla invece che farla espandere, dunque la resistenza meccanica è inferiore. Ma anche per merito della sua geometria cilindrica con teste emisferiche, la sua "forza" rimane consistente e alcune simulazioni e calcoli FEM eseguiti per me da un amico ricercatore, lo confermano.
Ho dunque stabilito un punto fermo, un limite operativo di -1200 metri, corrispondente a 121 bar.
Qualcuno penserà: dove trovi profondità del genere nel mediterraneo? che c**** ci vai a cercare laggiù?
Osservazione giusta ed inconfutabile, dopotutto io non lavoro sulle piattaforme petrolifere nel mare del nord e sicuramente in caso di necessità non chiameranno me, ma visto che disponevo della bombola, tanto valeva usarla.
Poi ho saputo che qui Italia esistono dei laghi e inghiottitoi carsici mooolto profondi, alcuni persino inesplorati ma superiori ai -400 metri. Vedremo se sarà possibile organizzare una spedizione esplorativa sul fondo...


La bombola ex sub riciclata come scafo resistente
Il nome Polifemo mi è venuto in mente guardando il ROV, con la sua telecamera che sembra un occhio solo mi pare adeguato, corredato dalla sigla 1K2, che indica la profondità massima progettuale.
Ma passiamo senza indugio alle sue specifiche:
Visione remota:
Camera PTZ (Pan Tilt Zoom) con risoluzione 2Mp (1920x1080 pixel), sensibilità 0.005 lux, zoom motorizzato 4X, web server integrato, dotata anche di microSD da 32Gb, interfacciata ethernet.
Il che garantisce una visione eccellente dei particolari con possibilità di zoomare e puntare l'obiettivo.
Propulsione:
- Due thruster di propulsione da 150W, reversibili, con elica tripala diam.180mm
- Un thruster di controllo profondità da 150W, reversibile, con elica tripala diam.180mm
- Un servomotore per il timone orizzontale da 30W, corsa 80+80 mm.
- Due controller duali per motori, da 30A, 24V, composti da 2+2 chipset VNH5019 della ST
I segnali di controllo propulsione sono gestiti tramite un Joystick multiasse
Sensoristica:
- Un sensore di pressione barometrica da 100 Psi (6.89 bar) per profondità max 50 metri, oppure da 300, 1000 o 2000 Psi per profondità superiori (1370m max).
Oltre per per indicare la profondità, viene usato anche dal sistema di assetto automatico.
- Un termometro/igrometro interno allo scafo, per monitorare eventuali infiltrazioni o formazione di rugiada.
- Un termometro esterno allo scafo, per monitorare la temperatura dell'acqua ed eventuali termoclini.
- Un voltmetro per tenere sotto controllo la tensione delle batterie.
- Un amperometro per controllare l'assorbimento e stimare l'autonomia residua .
- Un accelerometro/giroscopio per stimare l'assetto del ROV e controllare automaticamente il timone di profondità.
- Una coppia di illuminatori a LED da 12W, 4000 Kelvin
- Un relè per attivare i faretti a LED
- Laser DPSS per la misura della trasparenza dell'acqua
- Due relè per attivare i contenitori per la raccolta di campioni di acqua marina.
I dati di tutti questi sensori sono trasmessi all'operatore tramite collegamento in fibra ottica.
Equipaggiamento elettronico:
- Una webcam per videosorveglianza Dahua SD 22204UE, 2 Mpx, PTZ.
- Un Arduino Mega(micro ATmega2560)
- Una shield Ethernet con chipset W5100
- Un media-converter Ethernet-Fibra ottica a 100Mb
- Un HUB (switch) Ethernet a 5 canali: TP-Link TL-SF1005D
- Un partitore resistivo con due resistenze per la misura della tensione batterie
- Un sensore di corrente ad effetto Hall: ACS712 da 30A f.s.
- Un sensore di temperatura one-wire: DS18B20.
- Un sensore di temperatura/umidità DHT11.
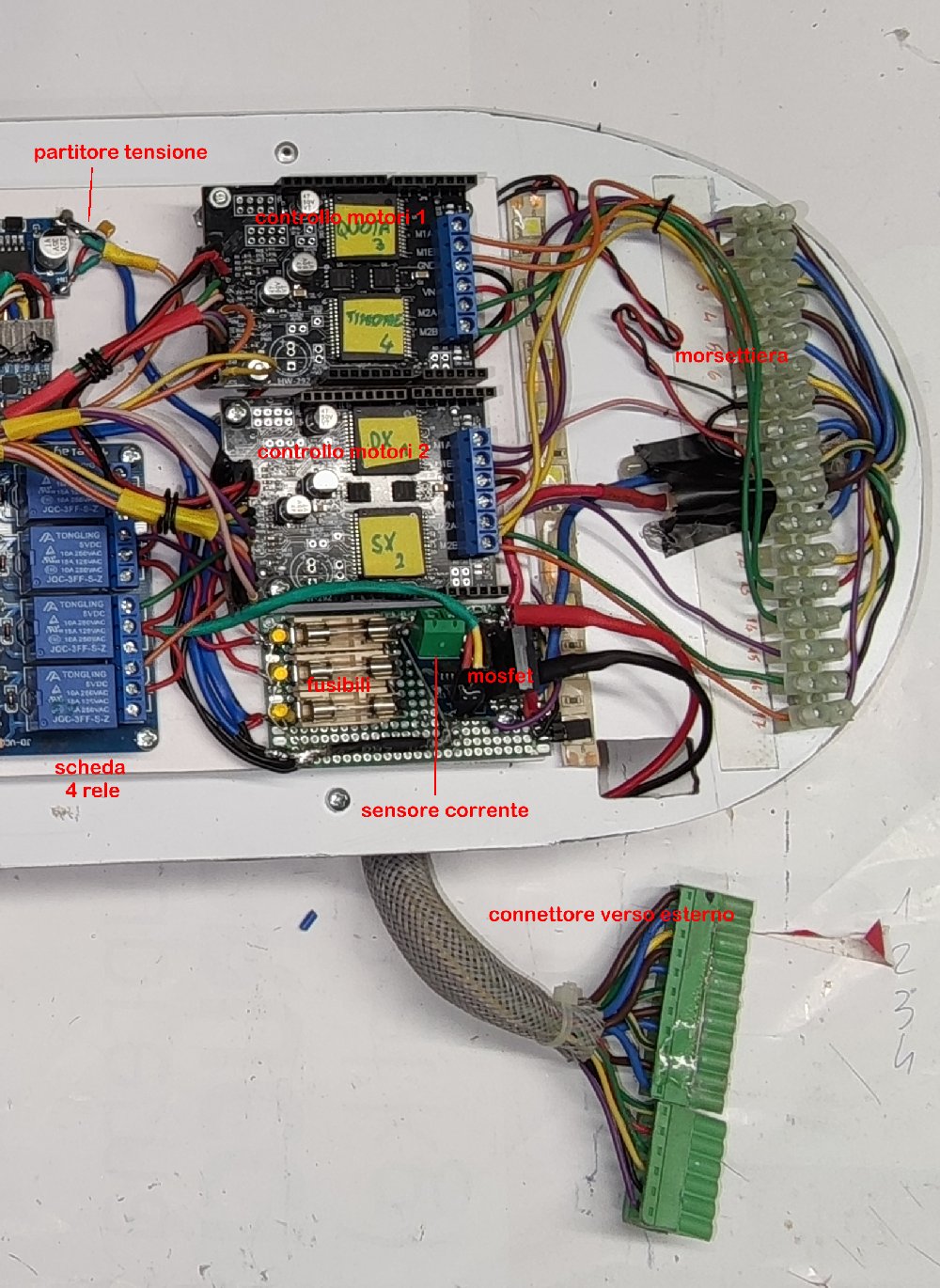
- Due motor driver Pololu duali: VNH5019 da 30A
- Un regolatore di tensione Stepdown da 5V 3A
- Un regolatore di tensione Stepdown da 12V 5A
- Giroscopio/Accelerometro MPU6050
- Un accumulatore al LitioFerroFosfato a 4 celle, Out 14V e 25000 mAh
- Una card con 4 relè con fotoaccoppiatore
- Un Mosfet IRFZ44, 60V, 25A
- Un cordone ombelicale in fibra ottica armata con kevlar, a 12 fibre, per il momento lungo 150 metri ma espandibile ad alcuni Km (max 25).
- Componenti e minuterie assortite (resistori, fusibili, portafusibili, interruttori, led, condensatori, morsettiere, millefori ecc.
Equipaggiamento di superficie:
- Un media-converter Ethernet-Fibra ottica 100Mb
- Notebook Winzozz10 con prestazioni decenti, per la CAM
- Eventuale secondo Notebook per i soli dati telemetrici
- Un HUB Ethernet o in alternativa un AccessPoint WiFi
- Un Joystick USB multiasse
- Un caricatore/equalizzatore per batterie LiFePh
- Un tamburo per avvolgere il cavo in fibra ottica.
- Cavi ethernet, patch in fibra, adattatori e minuterie varie.
- Eventuale gruppo di alimentazione inverter a 230V
Equipaggiamento opzionale ma non ancora implementato:
- Sonar a scansione
- Magnetometro per il rilevamento di masse ferrose
- Bearing magnetico (bussola)
- Sensore per la misura della salinità
- Telecamera posteriore
- Braccio manipolatore (necessita di telaio aggiuntivo e sorgente di energia ausiliaria)
Scopi ed utilità del ROV:
- Ricerca di oggetti o relitti sommersi
- Ispezioni tecniche su strutture sottomarine
- Censimento della fauna lacustre o marina
- Controllo oleodotti e dorsali elettriche o telefoniche
- Misure di temperature nel mare (mappa termoclino)
- Campionamento acqua a varie profondità
- Analisi sull'inquinamento da microplastiche o contaminanti chimici
- Controllo della torbidità dell'acqua
- Fotografia o videoriprese per documentari
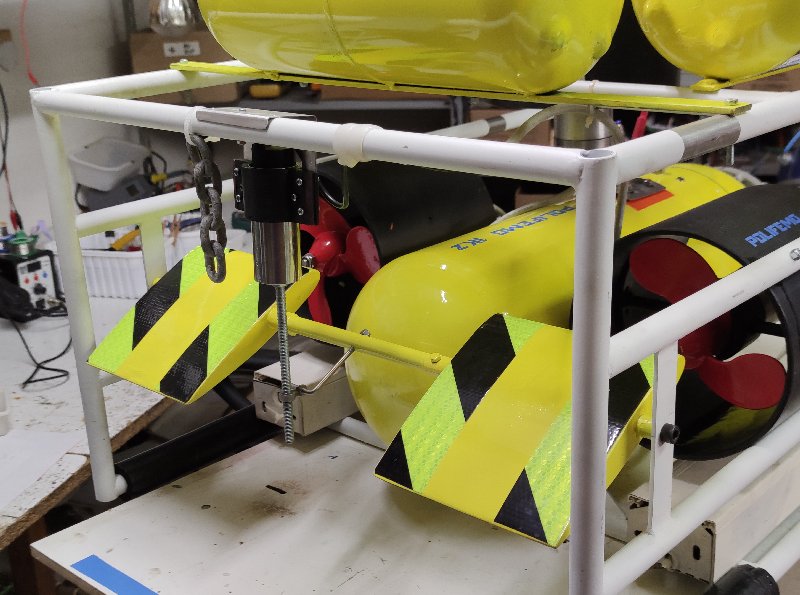
La realizzazione meccanica:
Mi serviva un telaio dove fissare la bombola e i propulsori, così ho disegnato una struttura in acciaio inox per evitare la corrosione dei tubi interni, dovuta soprattutto all'acqua di mare.
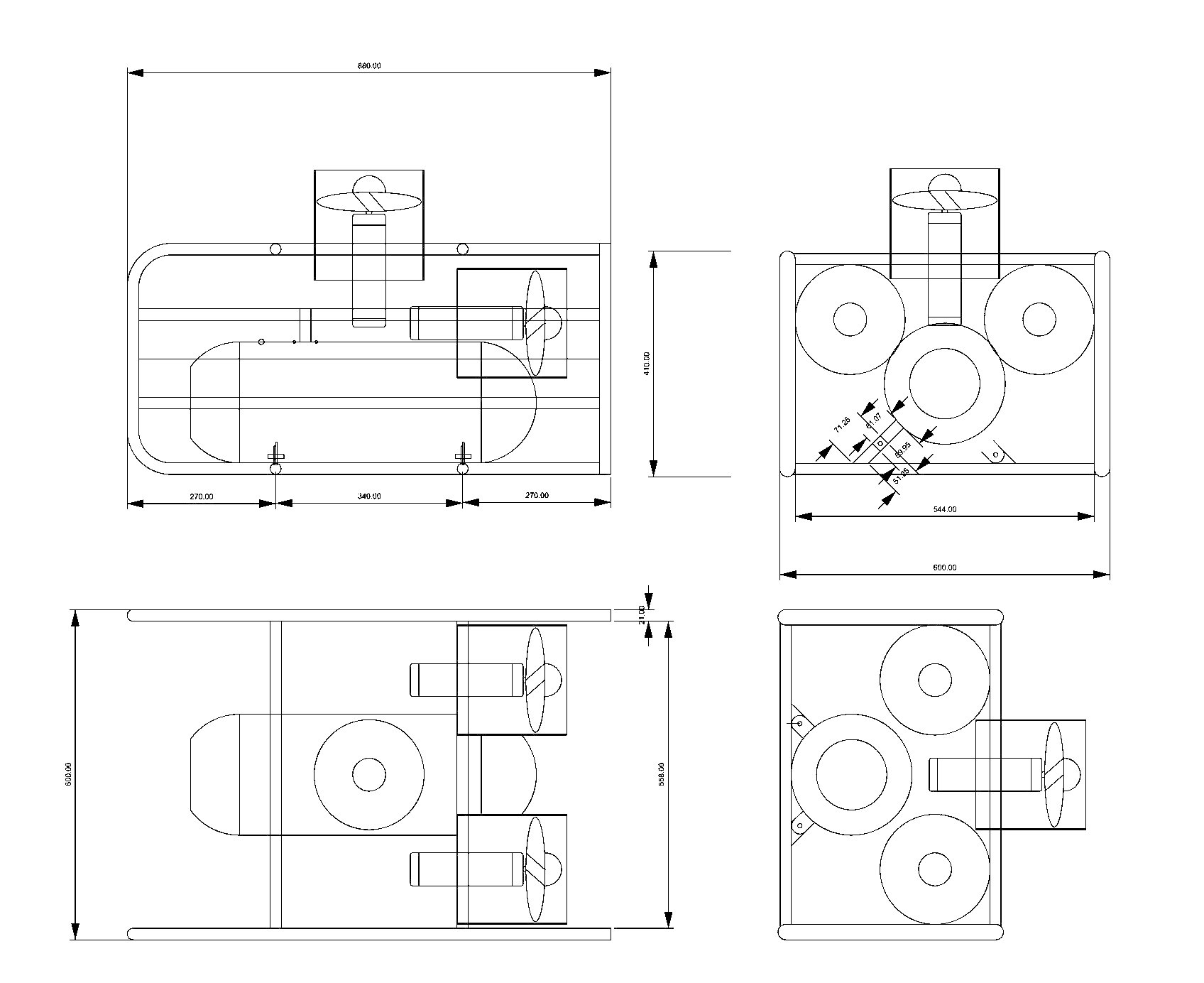

Ho realizzato un frame lungo 880 mm, alto 430 mm e largo 610 mm (vedi disegno), dotato dei vari ancoraggi per fissare bombola, motori, galleggianti, zavorre e timone.
Ho notato che durante l'immersione in vasca di prova l'acqua penetrava nel telaio dai fori dei bulloni di fissaggio dei vari elementi. Invece di impermeabilizzarli ho facilitato l'allagamento del tubi del telaio praticando dei fori, che servono anche allo svotamento al momento del riporto in superficie.
La testata della bombola è stata tagliata con la flex e rifinita al tornio, saldando internamente una flangia dove inserire un o-ring in gomma da 3 mm.
Il dispositivo di chiusura è realizzato con 4 bulloni M8 ancorati alla superficie esterna della bombola per mezzo di tubi in acciaio passanti.
Per ricavare l'oblò in policarbonato da 15 mm ho proceduto allo stesso modo, inserendo in mezzo delle guarnizioni gomma sintetica.
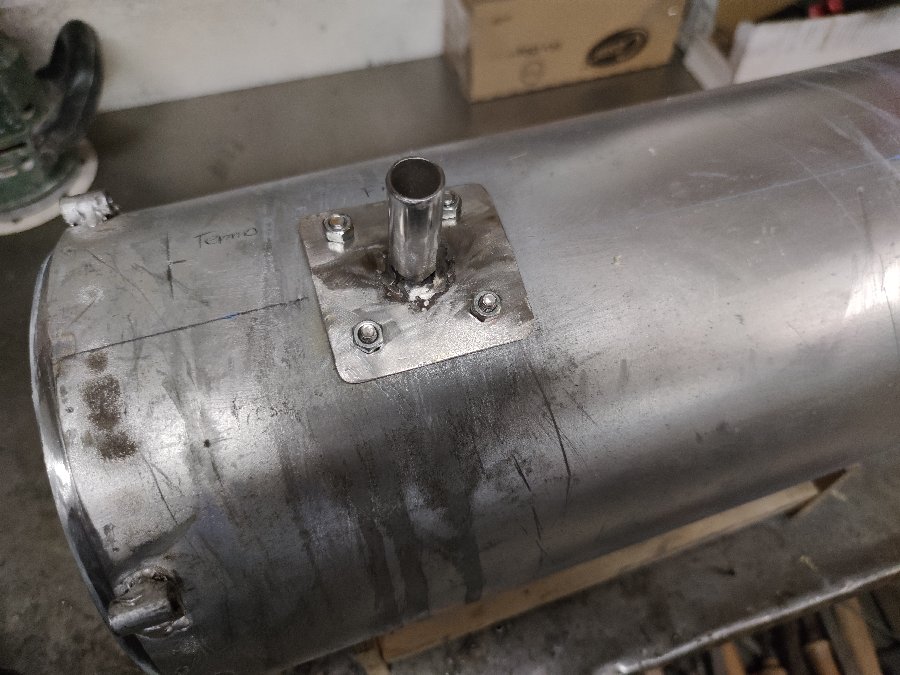
Ho poi forato la bombola sulla parte superiore per far passare il sensore di temperatura, di pressione e il cavo in fibra ottica.
Quest'ultimo, per essere affidabile, ha richiesto la costruzione di un "passacavo" in tubo d'acciaio, successivamente riempito di resina.
Nella zona inferiore ho praticato un foro per far uscire i cavi dei motori, illuminatore a led e i campionatori.
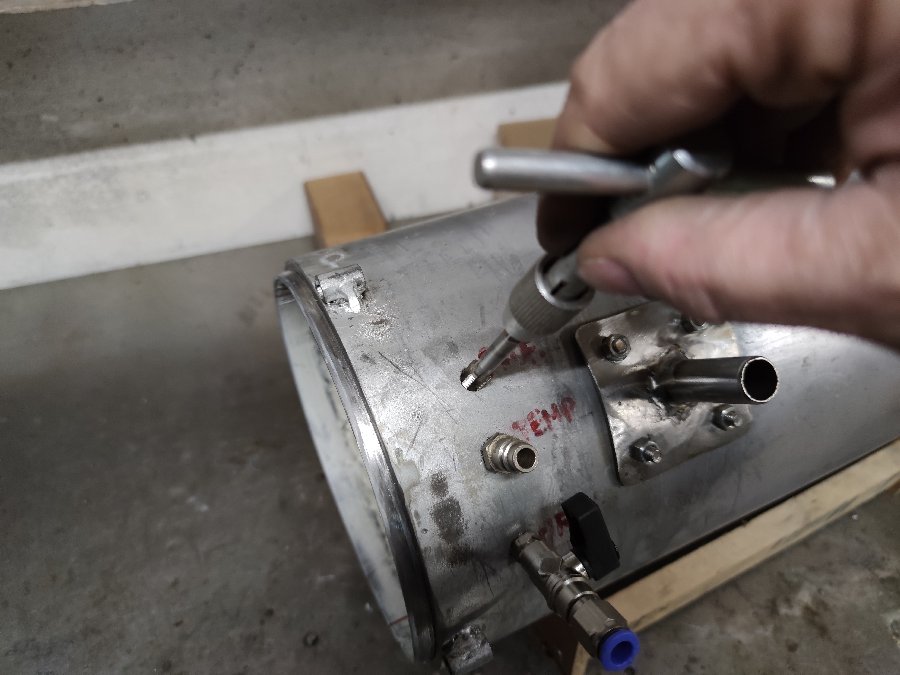
Ho poi sistemato una scatola di derivazione per impianti elettrici e dopo aver collegato e testato i collegamenti ho iniettato della resina epossidica per sigillare il tutto.
I bulloni saldati alla bombola ed incorporati nella colata di resina, che si possono vedere in foto, hanno lo scopo di ancorare stabilmente il blocco di resina e cavi.


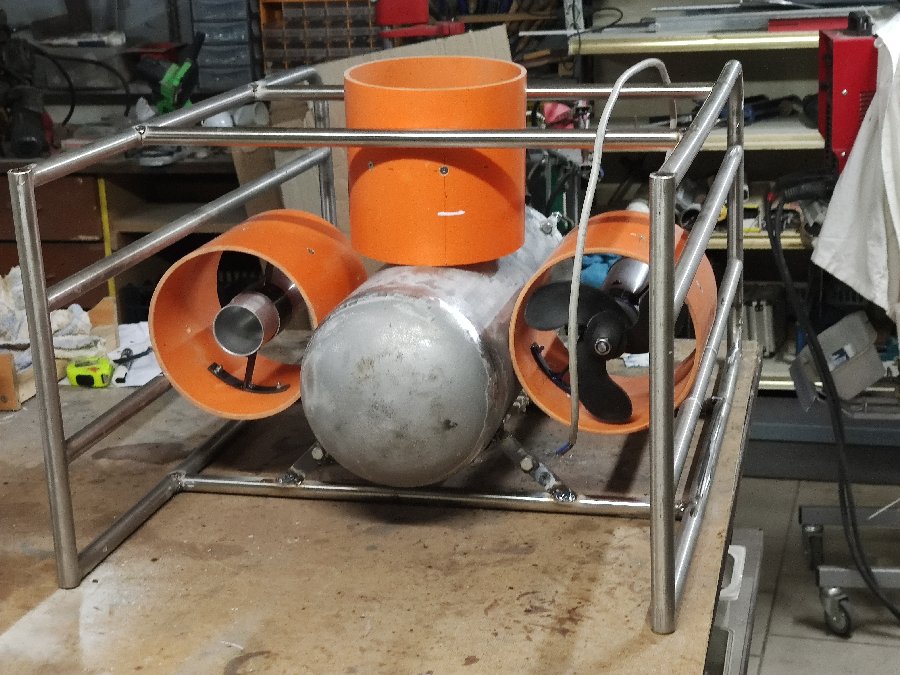
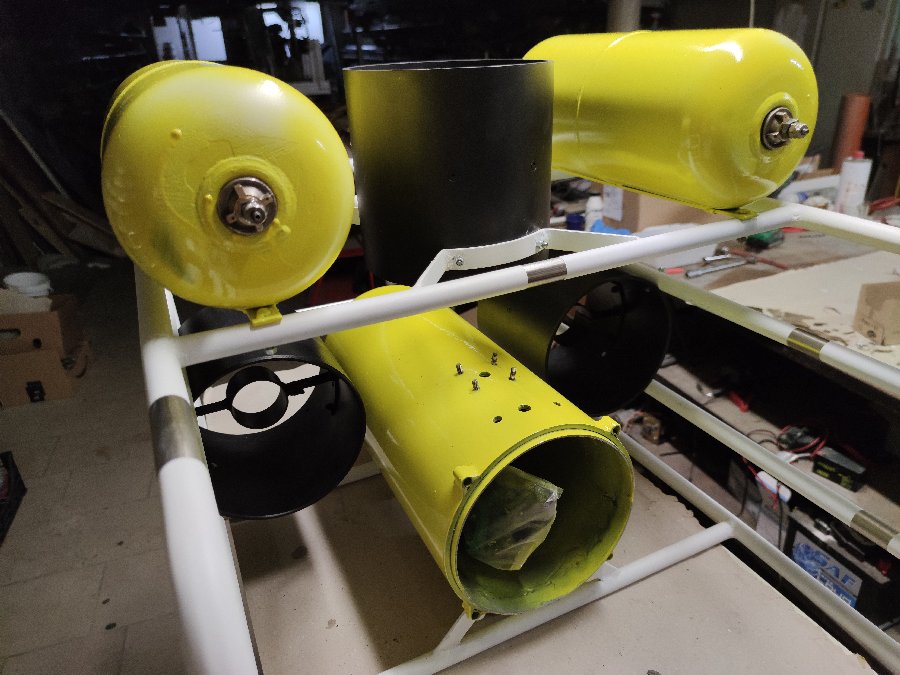
Sulla parte superiore sul telaio ho installato tre cilindri d'acciao (ex estintori a polvere adeguatamente svuotati, verniciati e pressurizzati a 8 bar), che hanno lo scopo di fornire una spinta positiva e di spostare il centro di galleggiamento verso l'alto, in modo da evitare il rischio di rovesciamento. La pressurizzazione serve a scongiurare lo schiacciamento dovuto alla pressione idrostatica.
Il tutto è stato verniciato a spruzzo con smalto poliuretanico bicomponente.
L'assembly ha un diametro di 220 mm e una lunghezza di 640 mm fuori tutto, il peso del veicolo completo è risultato essere sui 52 Kg.
Nella zona inferiore laterale ho fissato delle canalette per impianti elettrici che servono a contenere le zavorre.
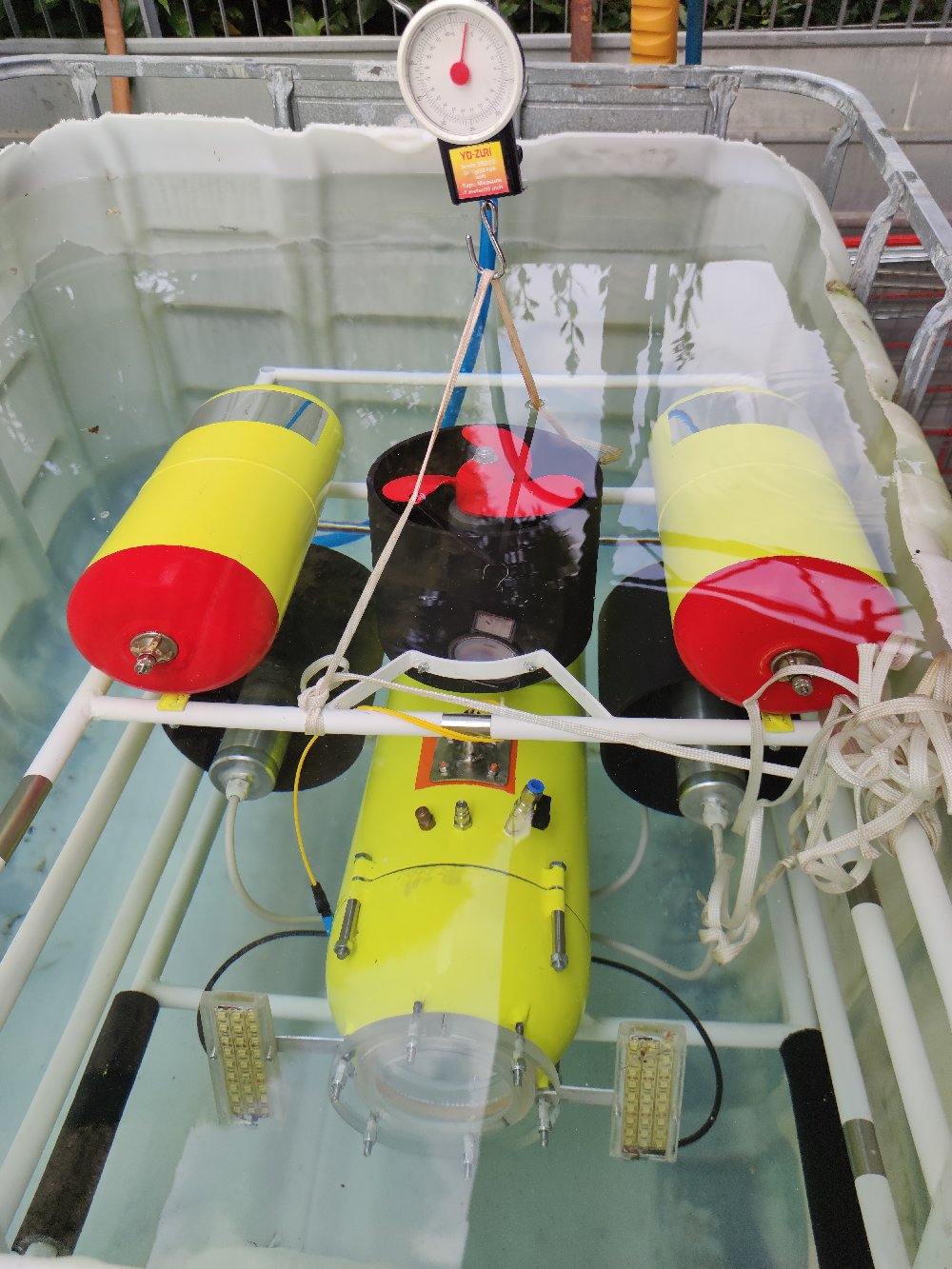
Il primo test è stato fatto in una cisterna di acqua dolce, immergendo il ROV completamente e aggiungendo sezioni di catena zincata in modo da ottenere un assetto neutro, cioè a pelo d'acqua.
In mare le cose saranno diverse, avendo l'acqua di mare una densità superiore, in questo caso basterà aggiungere zavorra per un altro 3,5 % di peso, equamente distribuita.
I Thruster:
Mi servivano dei motori per la propulsione e l'assetto, ma dopo varie ricerche in rete non ho trovato niente di idoneo alle mie esigenze. Però avevo a disposizione una ventina di trapani a batteria, gettati in discarica senza pietà e prontamente recuperati dai miei agenti segreti.
Una volta smantellati ho ricavato degli eccellenti motori elettrici dotati di riduttore epicicloidale, potenti ed affidabili (la gente li butta via quando la batteria è esaurita).


Scelgo tre motori con tensione uguale, li provo accuratamente per controllare l'assorbimento, poi disegno e stampo qualche accessorio con la Stratos 3D, tornisco delle chiusure in PVC, aggiungo un asse lappato e filettato, un case in alluminio, degli o-ring, un paraolio, un'elica, "et voilà", costruiti i propulsori.
Semplice ed economico, ma soprattutto molto... "maker".

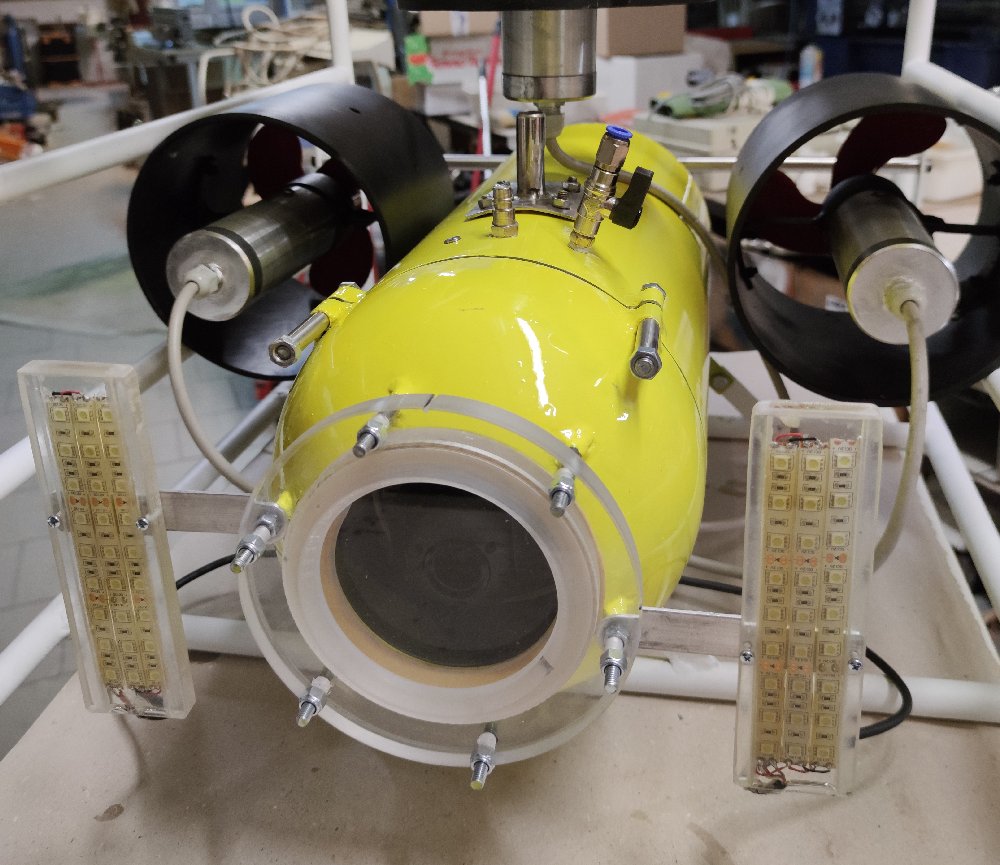
Dalle foto si possono vedere tutti i componenti sopradescritti, i motori hanno un diametro di 60 mm e sono lunghi 210 mm (280 mm elica compresa).
Le eliche di provenienza cinese le ho comperate in rete, sono in nylon caricato con fibre e sono costate circa 12 euro l'una. Il tappo passacavo è stato sigillato con resina epoxi per evitare infiltrazioni.



Il motore del timone di profondità è molto simile ma ha una potenza di soli 30W e aziona una barra filettata dotata di cursore e relativo meccanismo di snodo. Serve all'immersione rapida durante la navigazione.
La stabilizzazione della profondità la otterremo con l'impiego dell'apposito thruster azionato in automatico.
Consiste nel terzo motore, quello posto in verticale sopra la bombola ed ha lo scopo di mantenere la quota costante, senza usare i propulsori di crociera.
Può essere azionato manualmente dal joystick oppure in automatico, leggendo la pressione idrostatica istantanea ed attivando l'elica in modo opportuno per posizionarsi alla profondità prefissata.
La funzione non è ancora presente nel software attuale ma ci sto lavorando.
Prima di proseguire con l'allestimento ho preferito fare un collaudo di tenuta all'acqua.
Non avendo laghi disponibili all'interno del laboratorio mi sono inventato questa soluzione:
Una cisterna da 1000 litri alla quale ho tagliato la copertura superiore per ricavare una sorta di minipiscina, ci ho calato il ROV e l'ho lasciato immerso per alcune ore.
Fortunamente non ci sono state infiltrazioni, almeno per ora.
Vedremo cosa succederà a profondità serie...

ELETTRONICA E SOFTWARE
Seconda parte (elettronica e software)
Dopo aver visto com'è nato l'hardware di Polifemo, proseguiamo con la descrizione del suo equipaggiamento di controllo.
Per fare un lavoro pulito ed ordinato serve una base su cui fissare la componentistica.
Ho sagomato una piastra in alluminio inseribile nella bombola tramite scorrimento in due guide laterali, incollate alla bombola con epoxy.
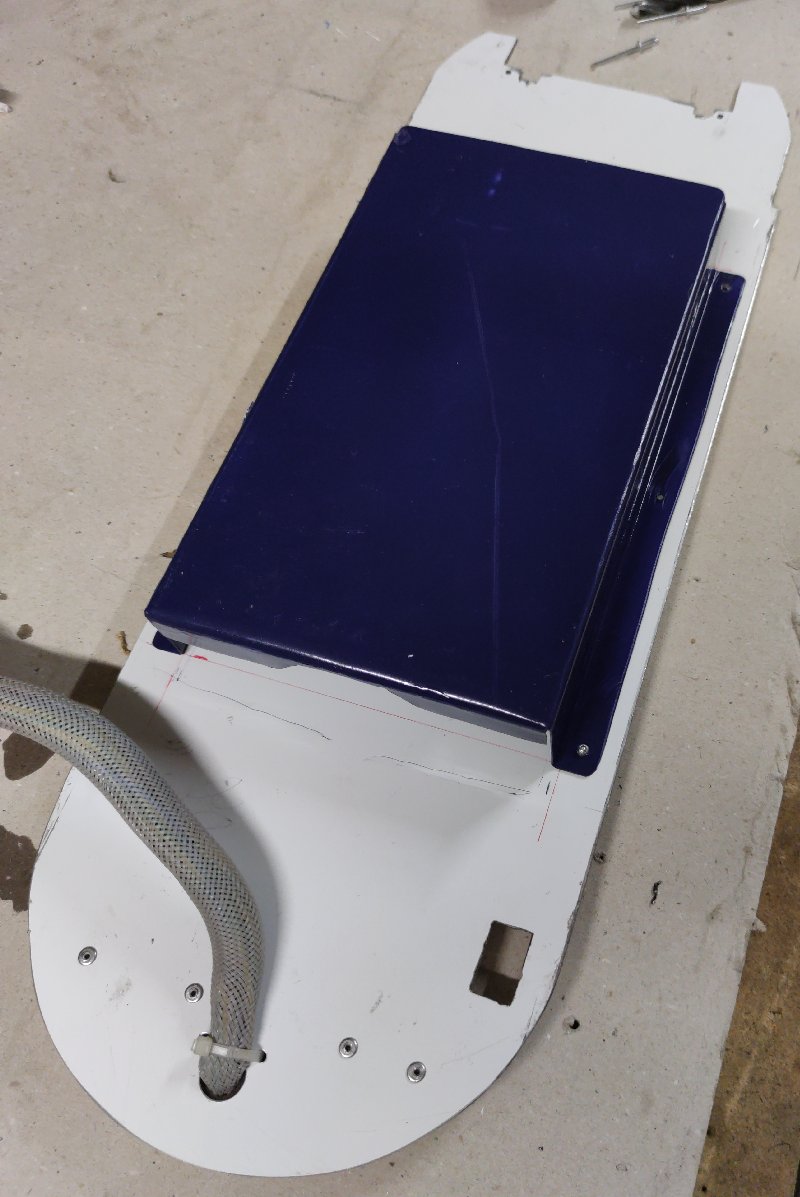

Nella parte inferiore è installata la batteria, una stupenda 4 celle al Litio Ferro Fosfato da 13V in grado di erogare 25Ah e del peso di (soli) 2200 grammi.
Al contrario delle Litio Polimero, questa batteria ha una lunga aspettativa di vita (almeno 10/12 anni) ma soprattutto non ha il vizietto di incendiarsi o esplodere.
Questo tipo di batterie sono attualmente molto usate nei sistemi di accumulo, ad esempio nel fotovoltaico.
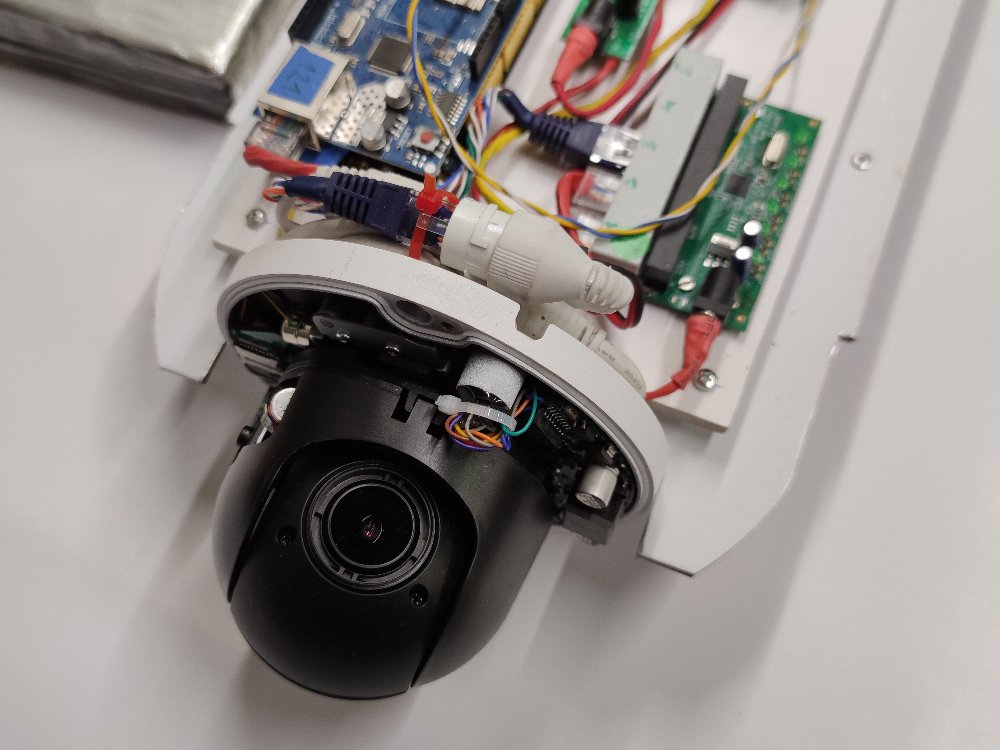
Sul lato anteriore è montata la telecamera PTZ e dietro di essa tutte le altre schede.
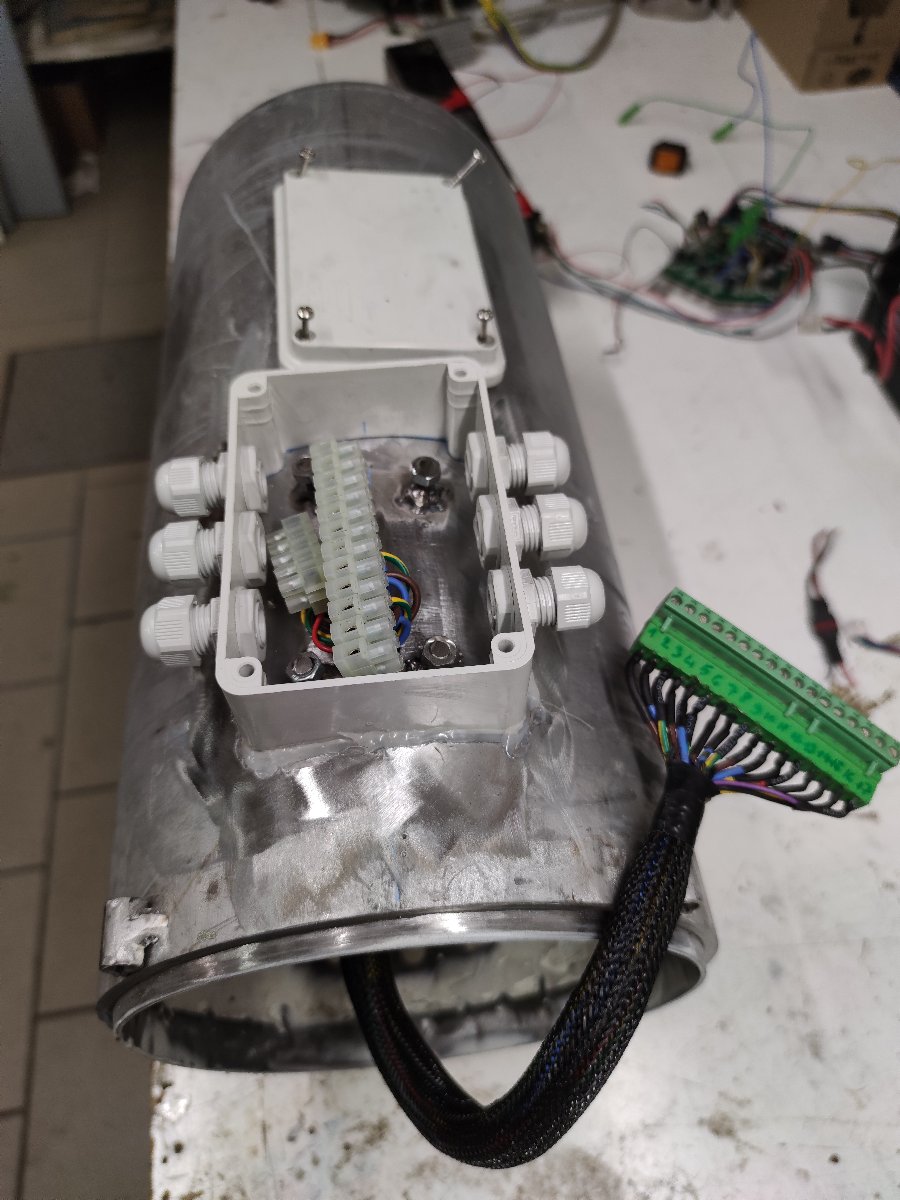
In fondo troviamo la morsettiera per i cavi in uscita verso l'esterno (17 linee distinte), tramite un connettore scollegabile per facilitare le manutenzioni.
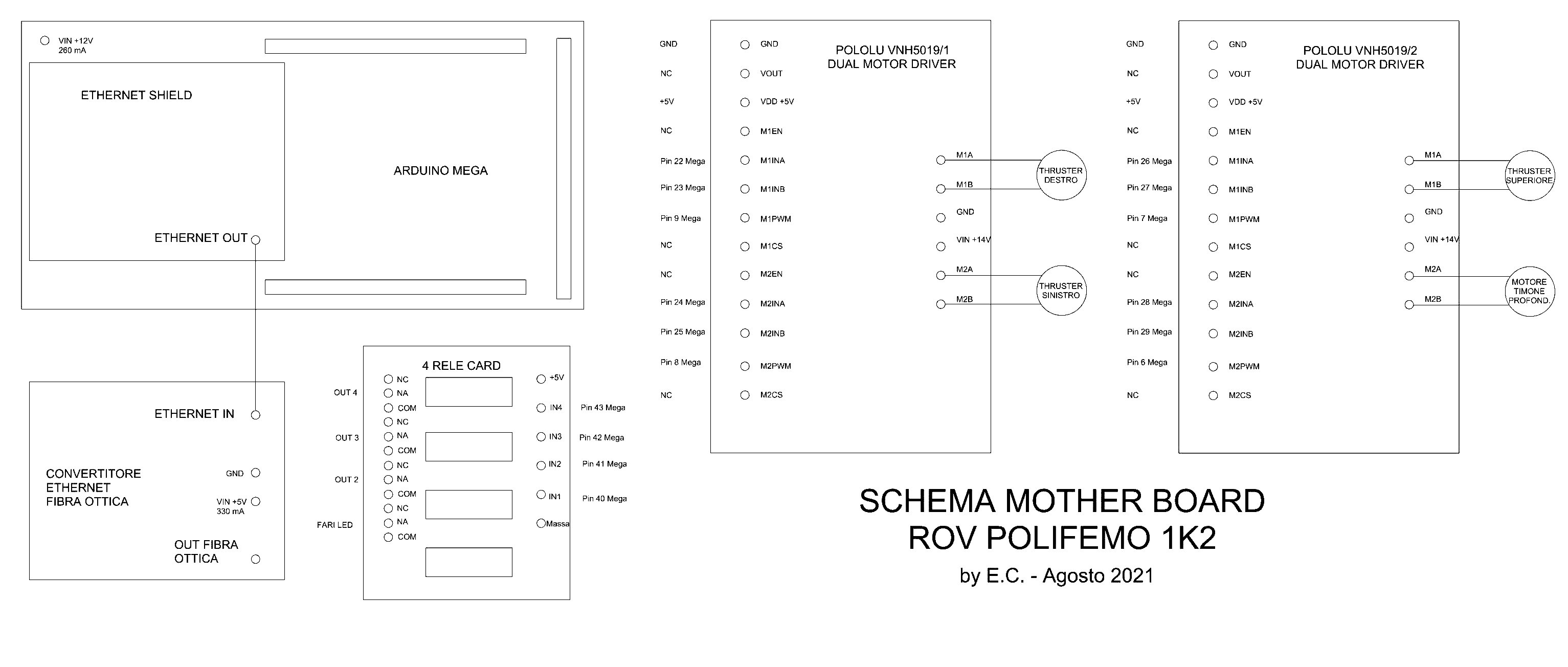
Analizziamo nel dettaglio l'accozzaglia di schede e schedine necessarie al funzionamento del ROV, questo è lo schema:
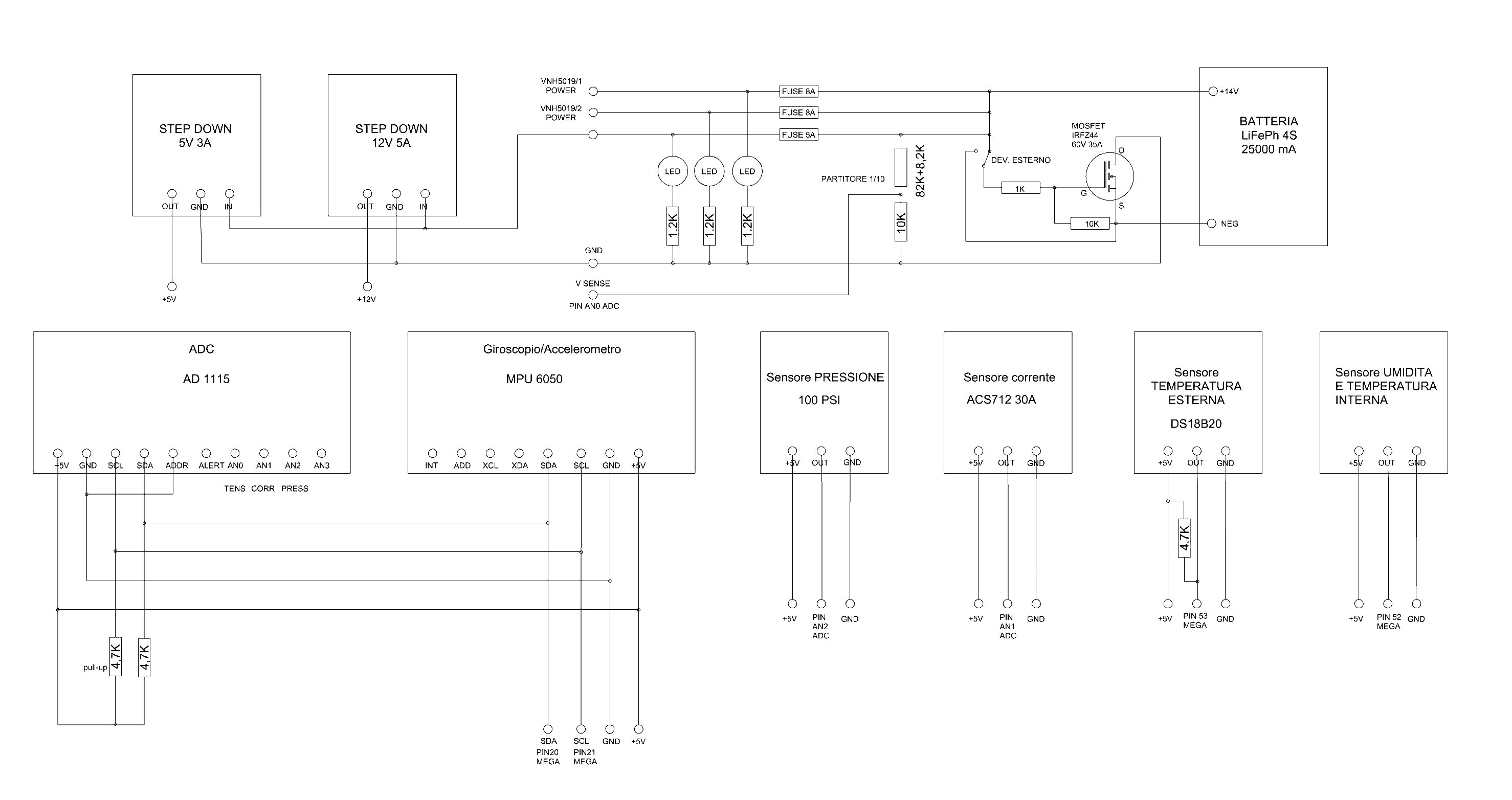
Lo schema riporta le schede impiegate ma per non complicare la grafica non sono state disegnate le connessioni fisiche.
Per lo stesso motivo non è riportato l'HUB ethernet a 5 porte e la webcam.
Il sensore di corrente è inserito sul ramo negativo dell’alimentazione, dopo il gate del MOSFET.
E' sufficiente fare la cablatura seguendo le etichette indicate sulle singole unità.
Dallo schema generale possiamo vedere che l'architettura è abbastanza semplice e lineare, ma purtroppo la cablatura non lo è altrettanto, almeno apparentemente.
Questo è dovuto alla necessità di cablare con filature discrete tutto l'insieme, senza ricorrere ad un unico circuito stampato.
Il motivo è ovviamente la natura "prototipale/sperimentale" dell'insieme, nata da prove, verifiche e correzioni continue.
Ad esempio l'impiego dell'ADC a 16 bit si è reso indispensabile perchè le porte analogiche dell'ArduinoMega non hanno una precisione sufficiente ed un tempo eccessivo per l'acquisizione dei sensori. Da qui la necessità di aggiungere un ADC esterno per leggere la pressione.
Anche l'accelerometro/giroscopio MPU6050 è stato aggiunto in un secondo momento, con l'intenzione di realizzare una IMU (piattaforma inerziale) per la navigazione/posizionamento automatico, dato che un magnetometro non è abbastanza affidabile vista l'abbondanza di materiale ferromagnetico presente nella struttura meccanica.
Il cuore del sistema è un Arduino Mega dotato di shied Ethernet, che gestisce l'acquisizione dei sensori, invia i dati della telemetria e soprattutto riceve i comandi dalla stazione di controllo.
L'uscita Ethernet è connessa ad un hub a 5 porte, insieme al segnale ethernet proveniente dalla telecamera. (Attenzione: questi componenti non sono riportati sullo schema elettrico)
Da qui esce ed immediatamente entra nel "media converter", che trasforma il segnale digitale in uno ottico, che viaggia attraverso la connessione in fibra verso la stazione in superficie, anch'essa dotata di un analogo media converter.
Al "Mega" sono anche collegati i sensori di pressione (un sensore industriale con uscita in tensione da 0 a 5 volt e NON con il protocollo 4-20 mA), il sensore di corrente ADS712 (out da 2.5 a 5V), il sensore di umidità e temperatura interna DHT11 (serve come allarme di allagamento), un sensore di temperatura esterna DS18B20 (standard one wire), il convertitore analogico digitale ADS1115 a 4 canali (con uscita I2C), il giroscopio/accelerometro MPU6050 (I2C) ed infine le due schede duali di controllo motori C/C Pololu VNH5019.
Non riporto i datasheet di questi componenti in quanto facilmente scaricabili dalla rete.
L'alimentazione proveniente dalla batteria passa tramite un interruttore "solid state" formato con un MOSFET di potenza IRFZ44 che serve ad attivare l'alimentazione generale senza dover aprire il frame, infatti è prevista l'installazione di un relè reed in prossimità dell'oblò della webcam.
In successione troviamo il partitore resistivo (10K+90K ohm) per la lettura della tensione batteria, il sensore di corrente e due stabilizzatori di tensione a 12V da 5 ampere e 5V 3 ampere, rappresentati da altrettanti circuiti "step down".
L'ultimo componente è una scheda di controllo relè a 4 canali, che asserve l'illuminatore a LED, un laser DPSS a 532 nm e due contenitori apribili a comando per il prelievo dell'acqua.
In realtà sto pensando di sostituire questi ultimi componenti con un dispositivo più raffinato: un "revolver" rotativo con 8 cilindri azionabili in sequenza con un solo segnale di comando. Ad ogni impulso un cilindro viene esposto per far entrare l'acqua e poi richiuso dalla rotazione del revolver, così via per i rimanenti.
Il laser è installato all'interno del frame, vicino all'obiettivo della Web Cam e da questa si può osservare la traccia nell'acqua, più intensa se l'opacità aumenta a causa delle particelle inquinanti.
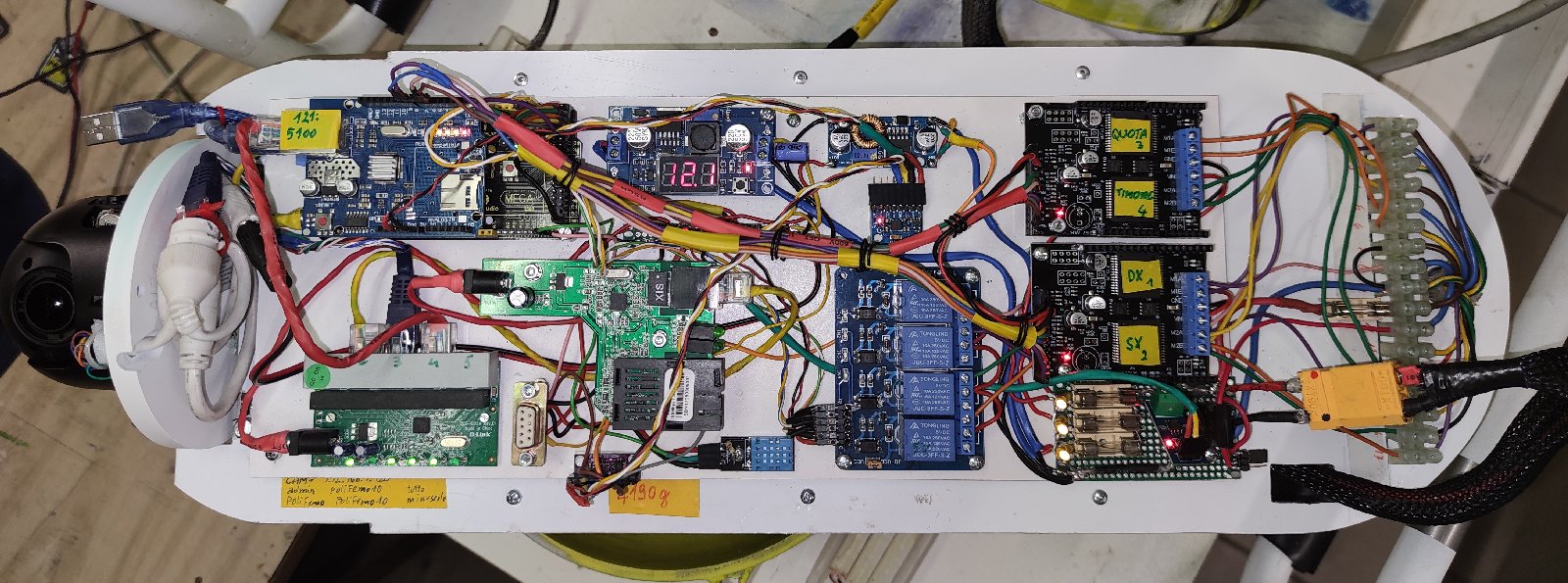
Ed ora alcune foto in dettaglio della piastra principale, con didascalie per maggiore chiarezza:
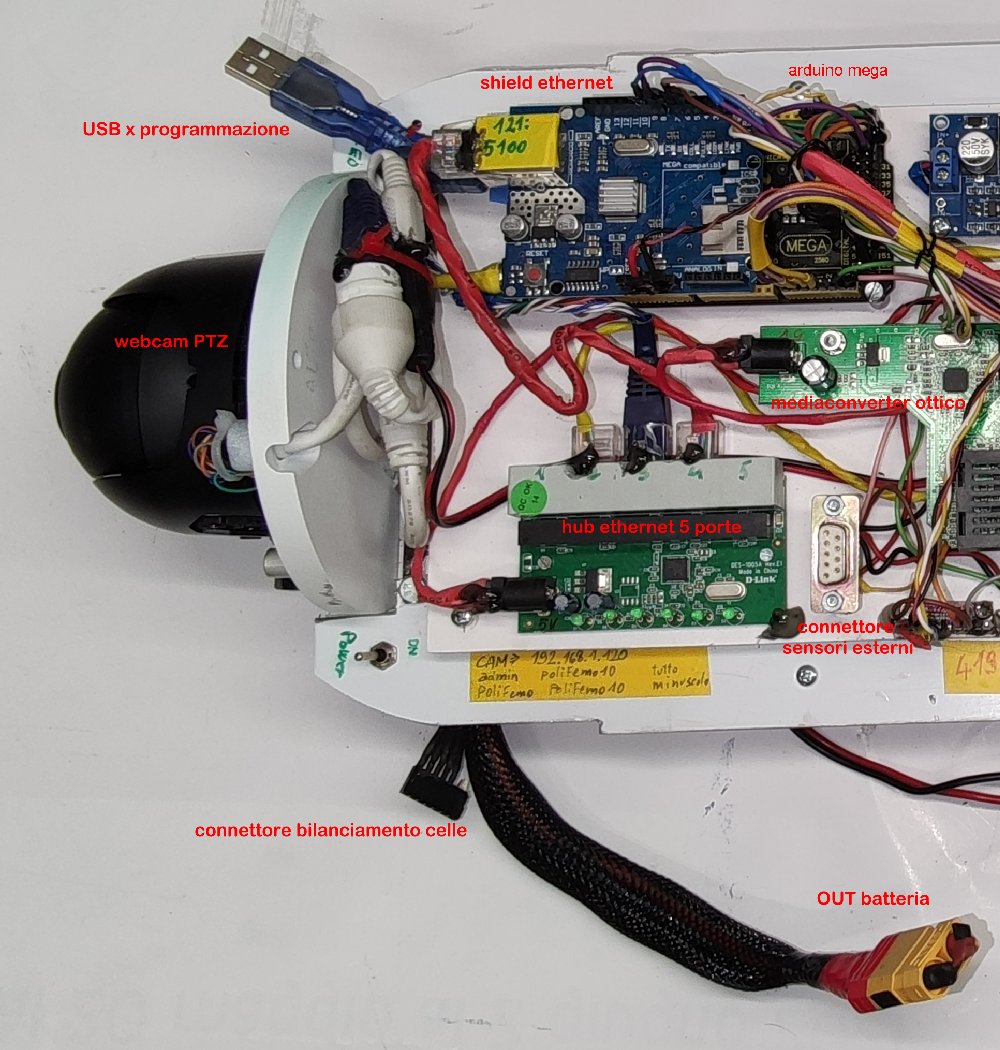
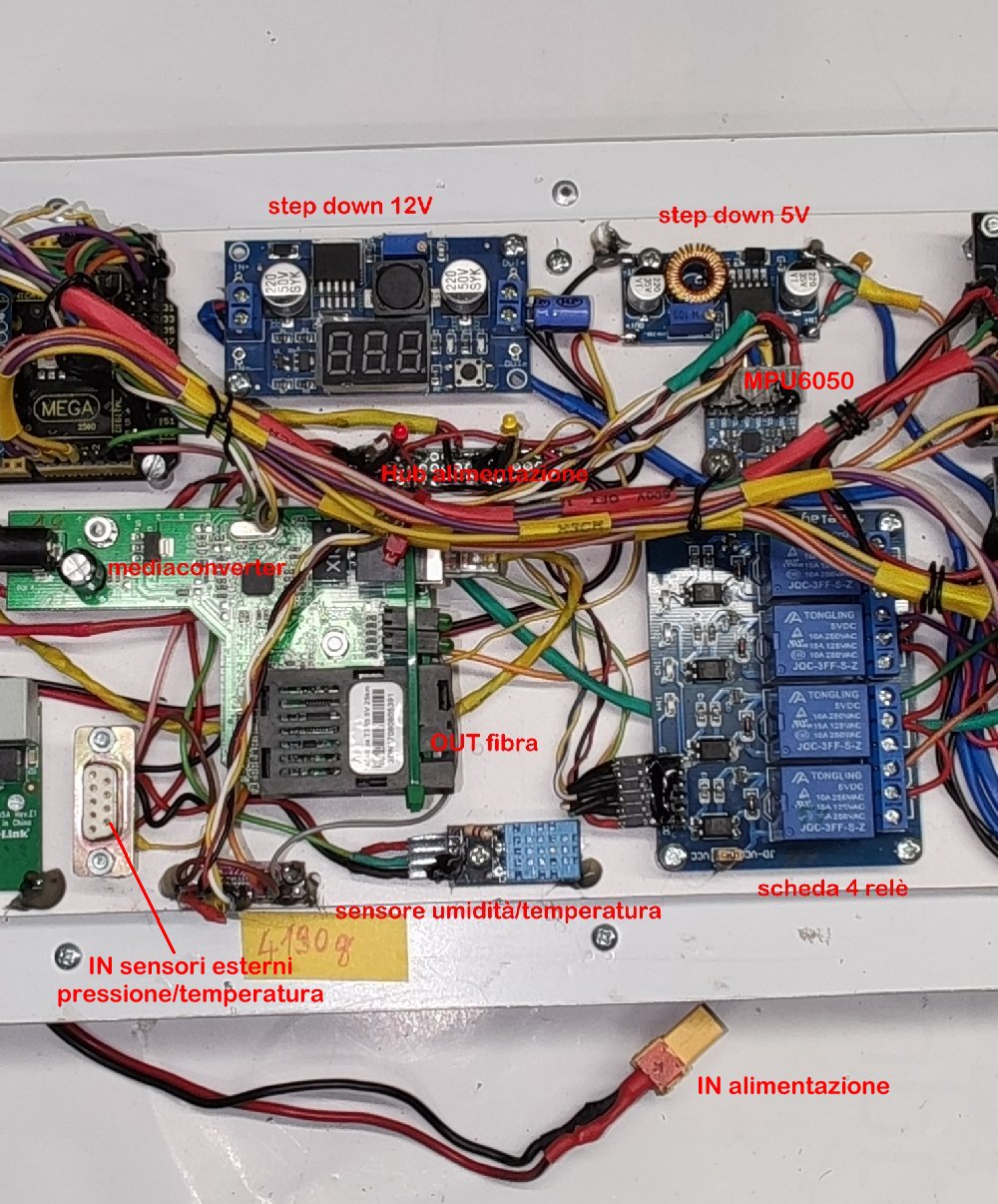
I segnali digitali della telecamera, telemetria e comandi remoti transitano sul cavo in fibra ottica, unico dispositivo che connette il ROV alla stazione di controllo.
Allo scopo serve un cavo robusto, flessibile e versatile, che possibilmente abbia una densità simile all'acqua, in modo da non creare zavorra aggiuntiva durante l'immersione.
Ho trovato un fornitore qui in Italia che mi ha offerto un cavo adeguato ad un prezzo accessibile. Il mio dispone di 12 fibre (io ne uso una sola), é armato con fibra di kevlar, ha un diametro esterno di 7 mm ed è assolutamente impermeabile.
Ho costruito un supporto a tamburo dove arrotolare e svolgere il cavo secondo necessità, facilmente trasportabile.
Gli illuminatori a LED:
Sul mercato si trovano centinaia di faretti a LED a bassa tensione, però nessuno di questi è idoneo all'immersione in acque profonde, nemmeno quelli progettati per le piscine.
A me necessitava un illuminatore assolutamente impermeabile, con almeno 10/12W di potenza, temperatura di colore 4000 kelvin, robusto e versatile. Anche in questo caso ho scelto l'autocostruzione.
Ho ritagliato delle lastrine di policarbonato trasparente da 180 x 50 mm con spessore 2 mm, ho poi ritagliato 12 altre striscie larghe 8 mm dello stesso materiale e le ho incollate sovrapponendole sui bordi.
Al centro della cavità così ottenuta ho applicato tre strip con nove LED a luce bianca connesse in serie. Ho incollato un'altra lastrina sulla parte superiore (come coperchio) e poi ho iniettato resina epoxy trasparente all'interno, in modo da creare un corpo solido.
Ho così ottenuto due piastre illuminatrici perfette per le mie esigenze, assorbono circa 1 ampere a 13,5V e posso affermare che sono indistruttibili.
Sono fissate con delle staffe in alluminio a lato dell'oblò della telecamera.
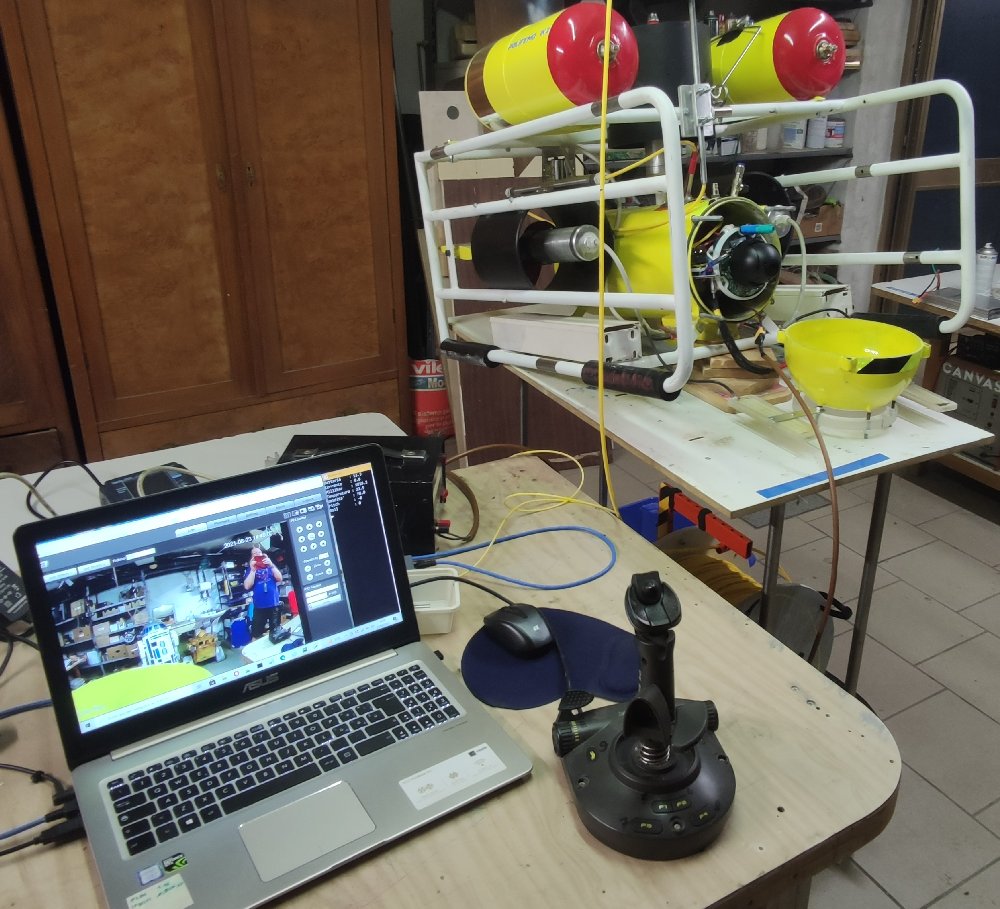
La stazione di controllo:
Come già accennato, la stazione di superficie comprende un normale notebook, un mediaconverter, un banco di alimentazione (inverter e batterie ausiliarie) e un Joystick.
Ho usato un normale joy per simulatori di volo e visto che disponeva di un sacco di pulsanti ne ho assegnati quattro al comando dei faretti led, del laser e dei campionatori.
Lo stick centrale comanda i motori di propulsione mentre un potenziometro in unione ai pulsanti di trim comanda il thruster di profondità.
Altri due switch controllano il timone di profondità.
In una prossima release software la profondità sarà stabilita e mantenuta in modo automatico con il rilevamento della pressione idrostatica, ma prima devo finire alcuni importanti collaudi.

Il software:
Per la sua realizzazione ho avuto bisogno dell'aiuto del mio amico Patrik B., ottimo conoscitore del linguaggio Python, che è stato usato per lo script installato sulla stazione di controllo. A lui va il mio sentito ringraziamento.
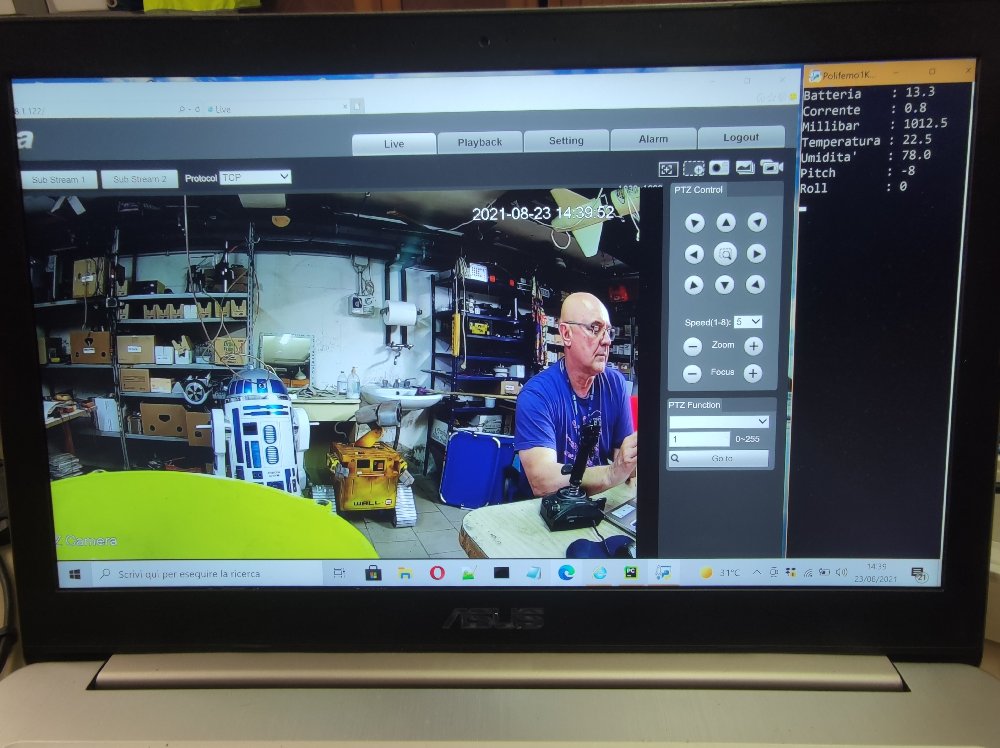
Il software riceve i dati telemetrici e li mostra sullo schermo del PC, oltre ad inviare al ROV i comandi rilevati dai Joystick.
Il software per arduino mega è basato sul protocollo UDP, creando un apposito canale di trasmissione dati bidirezionale, al quale viene incorporato il segnale dalla webcam, anche esso bidirezionale.
Questo è come si presenta il display della stazione di controllo: