R2D2, la versione aggiornata del robot C1P8
10/08/2011

Anche se sono affezionato al nome italiano mi dovrò abituare al nuovo nome R2D2.
In questi ultimi 30 anni il robot è sempre rimasto nel mio laboratorio, sepolto sotto strati geologici di cianfrusaglie, schede elettroniche guaste (ma sempre utili) e materiale vario e non ho mai trovato il coraggio di rottamarlo visto che era ormai diventato un pezzo storico e un bellissimo ricordo di una fase della mia vita di autocostruttore.
Oltre al rottame (piuttosto disastrato per la verità), mi rimanevano solo poche foto dell'epoca, con le quali ho redatto il primo articolo.
Spinto dalla nostalgia ho deciso allora di ricostruirlo e rendergli gli antichi fasti, facendo uso delle tecnologie aggiornate disponibili oggi.
Con questo articolo vorrei presentare la prima parte del lavoro di restauro, relativo alla parte meccanica ed estetica del robot.
In seguito, quando i lavori saranno ultimati, presenterò anche la parte squisitamente elettronica ed informatica implementata nel robot, tuttora in fase di sviluppo, della quale per il momento posso dare solo qualche accenno.
Il lavoro è stato svolto dal mese di Marzo al mese di Agosto 2011, complessivamente in circa 150 ore.
Il restauro
Ecco come si presentava il "relitto"prima dll'intervento:




Come si può vedere mancavano diversi componenti, come ruote, motori, sportelli, carenature ecc., per non parlare della parte elettronica....
Negli anni c'è stato un indiscriminato "saccheggio" della carcassa, per motivi di necessità di reperire componenti a costo zero, dunque del robot originale rimaneva davvero poco.
L'idea di base è semplice: restaurare il robot usando i componenti disponibili o almeno di recupero, riducendo al minimo la necessità di acquisto di componenti nuove.
Missione impossibile? Forse no, vediamo come...
Per prima cosa decido di smontare tutto e di rifare completamente il telaio interno. Questo perchè quello originale presentava un orribile supporto laterale (nascosto in modo grossolano dalle carenature esterne).
Con il CAD disegno uno schizzo del robot, ricavando le misure dalle foto reperibili sul sito ufficiale:
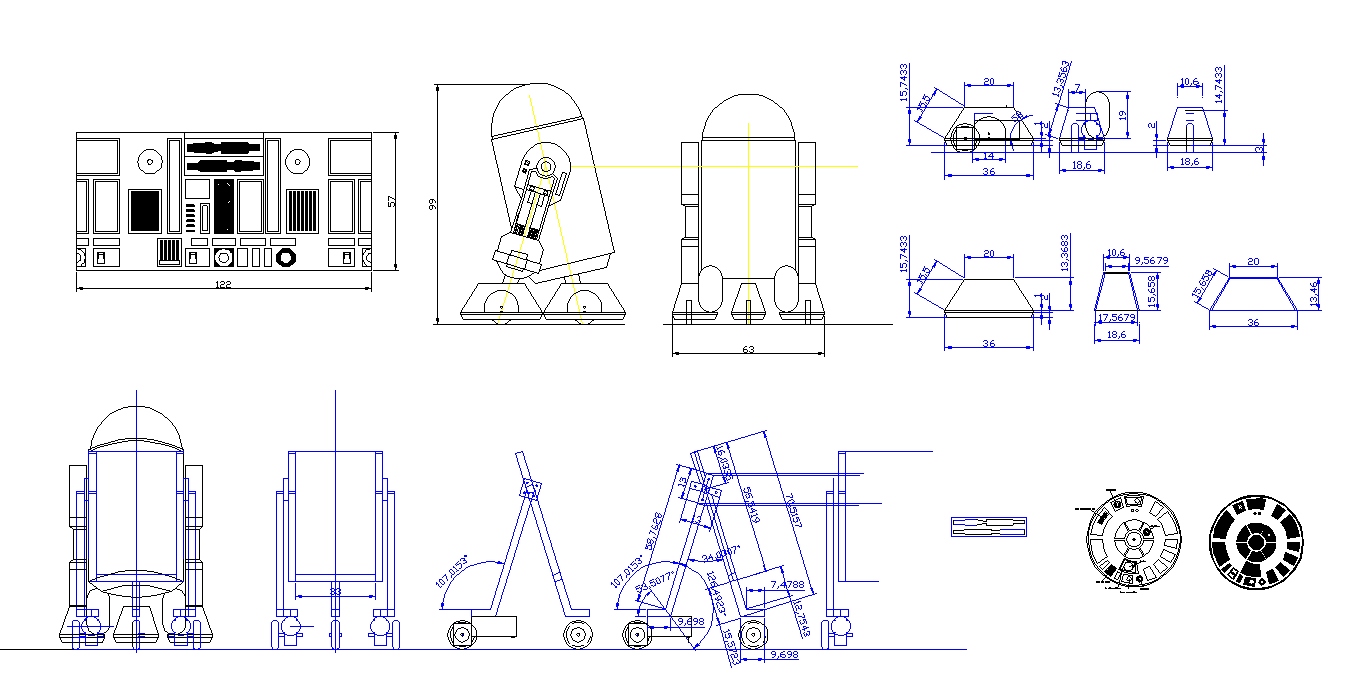
Dai disegni, dopo un pomeriggio di lavoro con troncatrice, saldatrice e mola smeriglio ottengo questo risultato, il telaio originale è quello bianco, mentre quello in metallo grezzo o verniciato di blu è quello nuovo :




Il nuovo telaio è decisamente diverso dal precedente, in quanto le "braccia" laterali sono incernierate sull'asse superiore e non necessitano di antiestetici supporti laterali o rinforzi.
Tutto è stato costruito con tubolare quadro da 30x30 mm che avevo in laboratorio.
Installo subito i motori, ricavati a costo zero da una decrepita sedia a rotelle motorizzata.
Si tratta di motori in continua a 24V che operano egregiamente anche a 12V, dotati di corona e vite senza fine in nylon, con assi a 90 gradi rispetto all'asse motore.
Marca e modello sono illeggibili ma almeno funzionano perfettamente.

Con qualche ora di lavoro al tornio realizzo le boccole e gli accoppiamenti necessari ad installare le ruote, prelevate da un carrello da supermercato (in disuso, non pensate male...).
Ora si tratta di adattare il corpo a barilotto sulla nuova struttura e di costruire un portabatteria per un accumulatore da 12V 18 Ah per usi motociclistici.
Provvisoriamente installo anche lo chassis destinato a supportare la parte elettronica (in seguito modificato).



Inizia ora la parte più laboriosa e meno divertente, realizzare i componenti in fibra di vetro per ricoprire il telaio esterno:



Il lavoro consiste nel creare degli elementi originali dai quali ricavare per laminazione i formatori negativi.
Da questi verranno poi ricavate le repliche in materiale composito.
Per esperienza so che per questo scopo il miglior materiale è il polistirene ad alta densità, reperibile in lastre di spessore 80/100 mm usate per l'isolamento termico degli edifici.
E' un materiale facile da incollare, tagliare, sagomare e rifinire con semplici attrezzi.
Io ho usato la tecnica del "filo caldo", che consiste in un filo in nikel-cromo da 0.8 mm riscaldato con un trasformatore a 12V da almeno 6/8 ampere.
La corrente riscalda il filo teso per effetto Joule (basta un peso da 0.5 Kg posto sotto il piano di lavoro) e questo penetra nel materiale come fosse burro.
Gli elementi complessi possono essere assemblati con semplice incollaggio epossidico e poi rifiniti con stucco, carta abrasiva e verniciatura.
Poi questi pezzi vengono spalmati di cera distaccante e di alcol polivinilico (che crea una pellicola idrosolubile) e laminati con gelcoat e fibra di vetro da 120 g/mq.
Da questo "stampo" possiamo ottenere poi innumerevoli elementi identici all'originale, usando la medesima tecnica.
Al termine del lavoro ho a disposizione gli elementi mancanti, ovvero le "scarpe" e le "gambe", che installo sul telaio:



Dopo la rifinura con carta abrasiva, gli elementi in vetroresina sono stati verniciati con smalto poliuretanico bicomponente bianco, che con sole due mani diventa perfettamente lucido e molto resistente agli urti ed abrasioni.
Ora devo pensare al sistema di rotazione della cupola , azionato da un servomotore naval-modellistico (verricello), smontato da un prototipo di vela alare con guida GPS costruito anni fa.
La piattaforma e relativo cuscinetto sono stati ricavati da un vecchio hard disk da 5", mentre l'asse è un tubo di alluminio:
Come si vede dalle foto, il movimento è trasmesso dalla puleggia all'asse cuscinettato per mezzo di un sottile cavetto d'acciaio (ex trascinamento carrello stampante di una Mannesmann MT86):

.jpg)
Ora è la volta della cupola. Visto che c'ero ho riutilizzato quella esistente, rinforzandola internamente con vetroresina per garantire maggiore rigidezza:

Poi ho realizzato delle aperture dove inserire le nuove matrici a led ed una carenatura sporgente dove verrà installata una webcam IP.
Nella versione precedente questi particolari non c'erano.



Una lunga levigata con carta abrasiva di varie granulometrie, una buona rifinitura con smalto poliuretanico bianco bicomponente e la cupola è pronta per essere verniciata con vernice argento metallizzato bicomponente.
Dopo adeguata schermatura con masking tape posso verniciare anche i particolari in blu elettrico metallizzato.
Il risultato è questo:

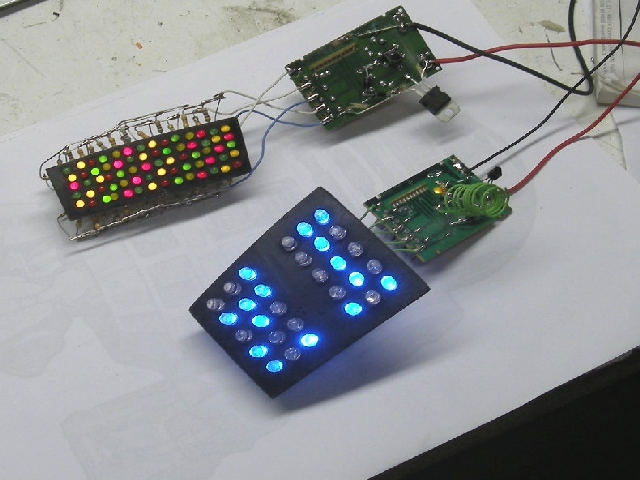
Devo ora pensare a qualche gadget elettronico per animare le matrici di led installate nella cupola.
Per la precisione sono due, una anteriore (con soli LED blu da 5 mm) ed una laterale con LED da 3 mm colorati.
Cablo tutti i led casualmente in modo da formare quattro canali distinti, poi li collego ad un gioco di luci di provenienza cinese, sostituendo i piccoli TRIAC con dei transistor ed eliminando tutto quello non necessario.

.jpg)
Prevedibile domanda : perchè non ci hai messo un PIC per pilotare i led?
Risposte (scegliete quella che più vi aggrada):
1 - perchè ho uno scatolone di questi aggeggi inutilizzati
2 - perchè erano praticamente già pronti
3 - perchè non avevo voglia di fare il circuito stampato
4 - perchè facevo prima
5 - per rispettare la direttiva sull'uso del materiale di recupero ( ! )
6 - perchè preferisco usare i PIC per applicazioni più serie
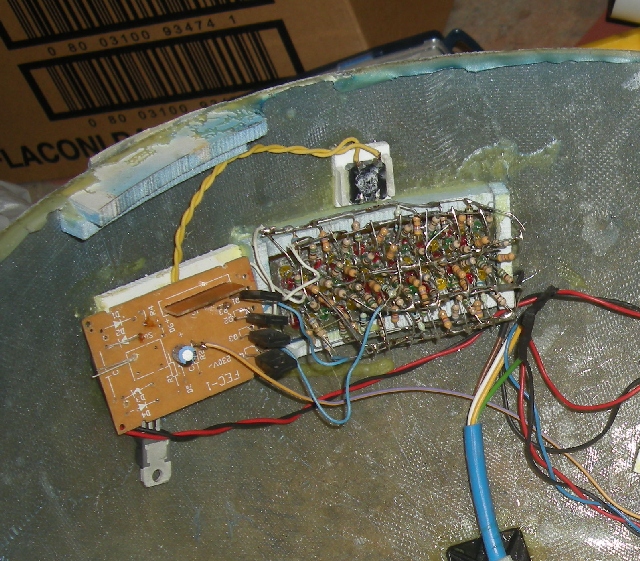
Essendo una realizzazione improvvisata non ho nemmeno redatto uno schema elettrico preliminare, diciamo che ho inventato il circuito mentre lo assemblavo ed incredibilmente ha funzionato tutto al primo colpo.
In pratica ho dovuto solo aprire lo scatolino ermetico tagliando i bordi, estrarre il circuito stampato, eliminare la parte di alimentazione a 230V e i triac, montare dei transistor BD139 al loro posto modificando leggermente lo schema.
La generazione dei giochi di luce è svolta da un singolo chip dedicato (senza sigla) montato a pettine sulla scheda e la sua funzione è quella di attivare i quattro canali in uscita in base a sequenze predeterminate.
Vediamo come sono stati montati:

Quiz: il primo che risponde correttamente vince un assortimento di led e fusibili bruciati di grande valore sentimentale:
A cosa serve quel filo verde che sporge dalla basetta nella foto qui sopra?
Qualche particolare dell'accrocco:


Ed ecco finalmente i sequencer a led installati nella cupola.
Da notarsi anche un'altra matrice di led rossi e blu ad alta luminosità posti all'interno del cilindro blu (ex tappo di detersivo per lavatrice).
Sono stati fatti lampeggiare dallo stesso circuito usato per gli altri LED.
Installando il circuito all'interno della cupola ho evitato la posa di cavi multipolari troppo delicati, ho invece portato sulla cupola mobile la sola alimentazione a 12V usando un solo cavo bipolare (quello blu visibile nella prossima foto).
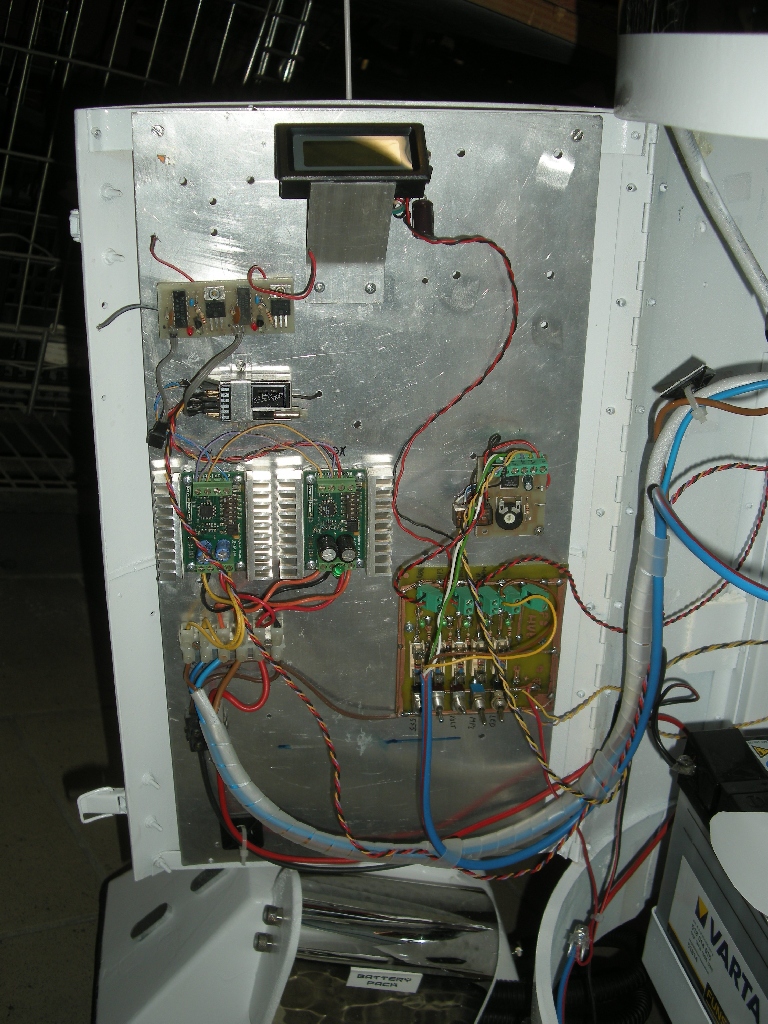
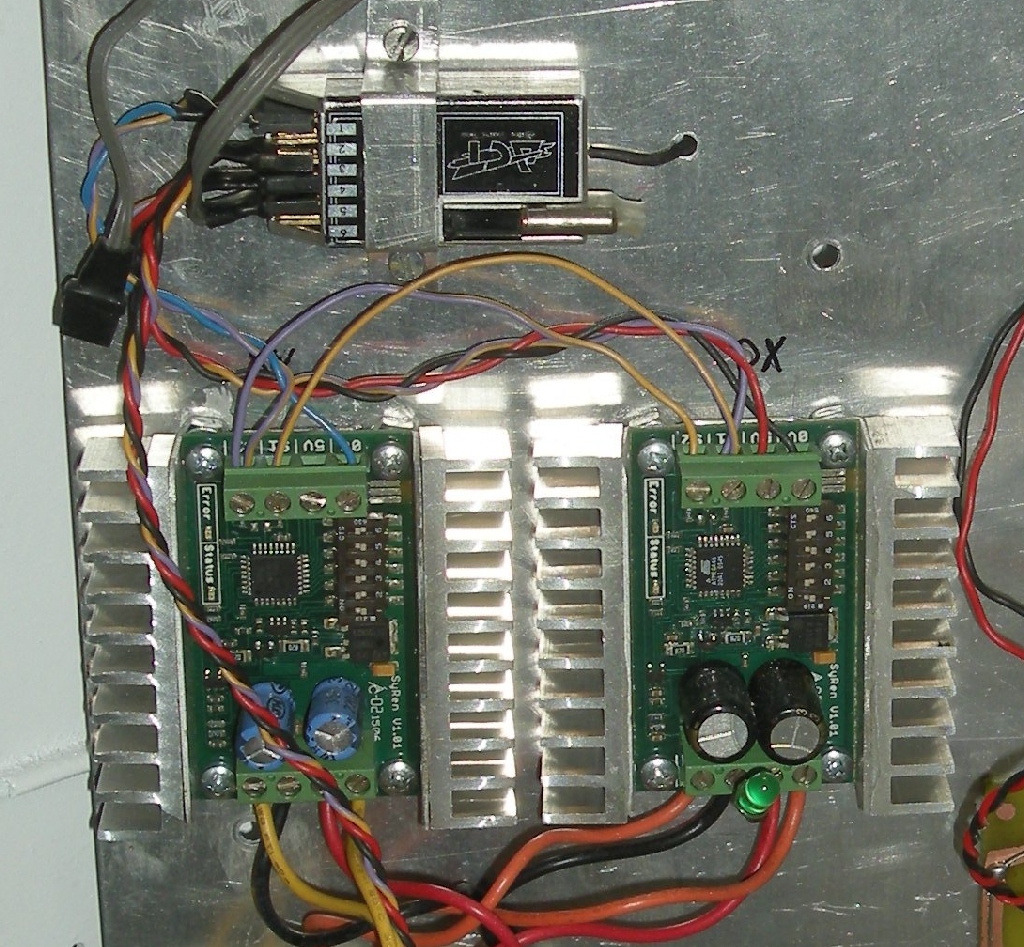
Questa è la piastra di supporto per l'equipaggiamento elettronico, montata attualmente sul pannello posteriore apribile.
Possiamo notare i driver dei motori, precisamente due moduli Syren 25, oltre ad un ricevitore per aeromodellismo (omologato of course), un regolatore di tensione per alimentare i vari carichi ed un interruttore elettronico a due canali, pilotato in PWM dallo stesso ricevitore.

Per il momento la "voce" del robot è fornita da un lettore MP3 con relativo amplificatore da 5 W che diffonde in sequenza continua i tipici strilli e borbotti dell'R2D2 originale.
I suoni sono stati scaricati dal sito: www.starwars.com/games/playnow/soundboards/#/ ?theme=09
http://www.starwars.com/games/playnow/soundboards/#/ ?theme=09
successivamente assemblati con molta cura e rielaborati con un programma di editor audio (Audacity).
ll lettore è installato sulla parete sinistra del robot , l'uscita audio è collegata all' amplificatore da 5 W visibile nella foto, sopra il lettore. Il file con i suoni è memorizzato su di una scheda SD da 2 Gb.
Se qualcuno desiderasse ascoltare la compilation di suoni che ho assemblato può scaricare il file MP3 da qui:
C1P8.mp3
Come già dichiarato all'inizio, la costruzione non è ancora terminata in quanto mancano tutta la sezione di controllo del percorso autonomo (line tracer), del sonar ad ultrasuoni per il rilevamento ostacoli, della webcam IP e del relativo datalink WiFi.
Il robot, oltre ad ad avere un minimo di autonomia, potrà essere controllato a distanza via internet.
La webcam trasmetterà il segnale audio e video in rete mentre un PC subnotebook equipaggiato sempre di datalink provvederà al resto.
In sostanza il sistema sarà controllabile in tempo reale da qualsiasi altro PC connesso in Internet.
Ma questa è un'altra storia, che sarà oggetto della seconda puntata.
Per il momento vediamo com'è venuto il robottino, una volta finita la parte meccanica:


E per i patiti di YouTube c'è anche un videoclip:
Altri ne seguiranno quando il robot sarà completato.
Come ultima immagine, allego quella del C1P8 com'era 30 anni fa, tanto per riconoscere le differenze.
.jpg)
Caratteristiche tecniche:
- Alimentazione: accumulatore per moto da 12V 18 Ah
- Driver motori: due moduli Syren 25.
-Datasheet:
- Radiocomando: Multiplex Cockpit MM con ricevente a 6 canali
- Motori: recupero sedia a rotelle, alimentati a 12V, marca e modello non specificati
- Controllo direzione: ruota anteriore libera, motori di trazione laterali (tank mode)
- Movimentazione cupola: servomotore Hitec HS785HB
- Generatore audio: MP3 reader per auto
- Amplificatore: mono 5 W autocostruito