Altimetro barometrico a doppia espulsione
10/02/2007
Altimetro barometrico a doppia espulsionedi Esteban Mascarella & Eugenio Cosolo
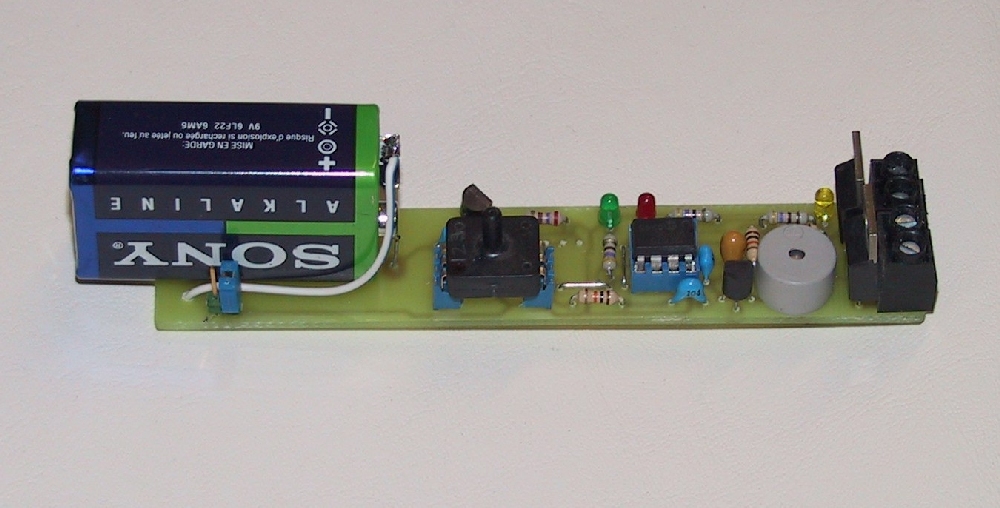
.jpg)
Foto di uno dei prototipi
Si tratta di un altimetro elettronico computerizzato in grado di rilevare la quota massima raggiunta da un razzo e di attivare due distinti sistemi di espulsione dei paracadute, uno all'apogeo ed uno alla quota di 200 metri.
Il valore della quota massima viene memorizzato per essere poi rivelato con una serie di beep codificati.
E' un dispositivo indispensabile per i razzi più evoluti e per quelli non dotati di un sistema di espulsione autonomo, come quelli propulsi da un motore ibrido.
Le dimensioni molto contenute lo rendono comunque adatto per qualsiasi modello di razzo, anche quelli più piccoli.
La semplicità costruttiva ed il costo modesto permettono la realizzazione a chiuque.
PRINCIPIO DI FUNZIONAMENTO
Come sappiamo, la pressione atmosferica varia in funzione dell'altitudine, perciò possiamo sfruttare questo fenomeno fisico per misurare la quota in cui siamo, misurando con precisione la pressione ambientale.
Purtroppo le cose sono leggermente più complesse, in quanto per motivi metereologici, la pressione teorica ricavata dalla tabella dell'ATMOSFERA STANDARD varia notevolmente in funzione delle condizioni meterologiche, come il susseguirsi delle alte e basse pressioni.
E' perciò indispensabile prima tarare l'altimetro ad una quota conosciuta e poi effettuare la lettura a quote diverse.
La taratura è ovviamente destinata a deteriorarsi in poco tempo ma per le nostre esigenze è sufficiente conoscere la pressione iniziale del punto di lancio.
Il processore svolge automaticamente questa funzione: al momento dell'accensione campiona la pressione ambientale e la memorizza come "quota zero".
Se ad esempio siamo a quota 30 metri sul livello del mare e la pressione rilevata è di 1000 millibar, questo valore sarà considerato come base (quota zero) per il successivi campionamenti per stabilire la quota differenziale.
Dopo l'azzeramento il processore verifica le letture successive per stabilire se effettivamente è iniziato il volo.
Se la pressione diminuisce per l'equivalente di 100 metri di quota, decide che il volo è iniziato e "arma" il dispositivo di espulsione del paracadute.
Questa fase serve a introdurre un fattore di sicurezza in modo da non rischiare di espellere il paracadute per errore.
Lievi variazioni di pressione possono essere causate ad esempio da refoli di vento, che potrebbero trarre in inganno il sistema facendogli credere di essere già in volo.
A questo punto il microprocessore attende che il decremento di pressione termini, il che significa che la quota massima è stata raggiunta.
In questo istante attiva il canale collegato all'espulsione del paracadute "drogue" e poi continua a rilevare la pressione ambientale, questa volta in aumento, visto che siamo in fase di discesa.
Quando secondo i suoi calcoli la quota raggiunge i 300 metri attiva la seconda uscita, quella collegata all'espulsione del paracadute principale che ha il compito di rallentare la discesa ad una velocità di sicurezza. Al termine del volo il processore inizia una sequenza acustica in codice per informarci sulla quota massima raggiunta (vedi i dettagli in seguito).
LA PRESSIONE ATMOSFERICA IN FUNZIONE DELLA QUOTA
Abbiamo visto che un altimetro barometrico stabilisce la quota in funzione della pressione atmosferica.
Possiamo ricavare la pressione teorica (valida fino a circa 6000 metri) dalla seguente formula (in formato excel) :
Pq = P0 * ( EXP ( (H / 8000 * - 1 ) ) )
Dove:
Pq = pressione atmosferica in quota (mBar)
P0 = pressione atmosferica alla quota di lancio (mBar)
H = quota (metri)
La formula che ci permette di risalire alla differenza di pressione in base al codice audio emesso dal microprocessore è la seguente :
delta P = codice altimetro * 1,0845
Il valore di 1,0845 è ricavato dalle caratteristiche del sensore di pressione e dalla conversione AD del microprocessore.
Se ad esempio l'altimetro emette il codice 75, possiamo calcolare che la variazione della pressione atmosferica tra la quota zero e l'apogeo è di:
delta P = (75 * 1,0845 ) = 81,34 mBar
Considerata P0 la pressione della quota di lancio (supponiamo 1013,25 mBar), la pressione assoluta all'apogeo è di :
Pq = P0 - delta P = 1013,25 - 81,34 = 931,91 mBar
(La leggera differenza di valori rispetto alla tabella dell'ATMOSFERA STANDARD è dovuta agli arrotondamenti introdotti nei calcoli).
La pressione ottenuta può essere convertita in metri di quota applicando la seguente formula :
H = 8000 * ( log e ( P0 / Pq ))
Per comodità ho allestito un semplice foglio Excel per il calcolo immediato di tutti i parametri, con step di 25 metri, scaricabile QUI
La tabella può essere stampata e usata "sul campo" per ottenere il valore effettivo della quota raggiunta.
PRINCIPIO DI FUNZIONAMENTO
Il cuore del sistema è un microcontroller PIC 12F675. Pur nelle dimensioni ridotte (ha solo 8 piedini) questo chip dispone di 6 pin programmabili I/O (entrata / uscita), un convertitore analogico a 10 bit, un oscillatore interno, timer programmabili, 1K words di memoria a tecnologia Flash (riprogrammabile), 64 Bytes di memoria RAM, 128 Bytes EEPROM e altre periferiche minori.
La pressione atmosferica viene misurata da un sensore di pressione XFPM-115KPA Fujikura che eroga in uscita una tensione proporzionale alla pressione ambientale, l'unico componente esterno necessario a questo trasduttore è un condensatore.
L'uscita analogica di questo sensore è collegata al pin 7 (GP0, programmato come entrata analogica) del PIC attraverso filtro composto da R1 e C1.
I pin 2,3,4,5,6 ( GP5, GP4, GP3, GP2 e GP1 ) sono invece programmati come uscite .
Il programma effettua una lettura iniziale dopo 5 secondi dall'accensione per determinare la quota zero, considerata come quota di riferimento.
Raggiunta la quota minima prestabilita di 100 metri, il sistema si "arma" e si accende il LED verde (armed), questo serve al sistema per sapere che il razzo è decollato (vedi sopra per i dettagli).
Poi il microcontroller determina se il razzo ha raggiunto l'apogeo (la quota massima dell'inviluppo di volo) e per far questo il PIC continua a calcolare la quota attuale e la compara con la lettura precedentemente memorizzata in modo di capire se il razzo è ancora in fase di salita .
Se per un certo numero di volte la lettura è inferiore all'ultimo valore memorizzato significa che il razzo ha raggiunto l'apogeo e perciò è iniziata la discesa.
A questo punto viene attivato per un secondo il pin 3, sul quale è collegato un mosfet di potenza che ha lo scopo di attivare la carica di espulsione per aprire il paracadute secondario (Drogue).
Poi il programma continua a leggere la quota e quando viene raggiunta un'altra quota predeterminata, minore a quella di apogeo, viene attivato il pin 5 per un secondo, anche questo collegato un mosfet di potenza che funge da interruttore per attivare l'espulsione del paracadute principale (Main).
Infine il programma comincia a riferire il valore della quota massima per mezzo di una serie di beep audio emessi dal buzzer.
La codifica usata è la seguente: 1 beep per la cifra uno, 2 beep per il due, ecc. 10 per lo Zero.
Dopo ogni cifra è inserita una pausa, mentre una pausa più lunga indica l'inizio della sequenza.
Il gruppo di quattro cifre (il valore massimo della lettura è 1023) rappresenta il valore memorizzato nel microprocessore, ma deve essere convertito in metri di quota con la tabella illustrata in figura.
La lettura viene ottenuta sottraendo dalla quota rilevata la quota zero, pertanto la lettura è relativa alla quota di lancio.
L' alimentazione viene fornita da una minibatteria a 12V oppure da una pila rettangolare da 9 V, regolata a 5V dallo stabilizzatore LM317L.
Il trimmer multigiri R3 di 1K serve a regolare questo valore con precisione. Il motivo per cui è stato usato un LM317 al posto del classico 78L05 è la maggiore deriva termica di quest'ultimo e poichè la tensione di 5 V serve anche come riferimento per il convertitore analogico interno al PIC, se questo non è preciso anche la conversione perderà in precisione.
LA REALIZZAZIONE PRATICA
L'assemblaggio del circuito è facilitato dal circuito stampato illustrato nei disegni, da realizzare con le solite tecniche.
Le dimensioni sono davvero ridotte in modo da poter installare l'altimetro anche su modelli di piccole dimensioni.
Le saldature dovranno essere molto accurate poichè il circuito sarà sottoposto a violente accelerazioni in fase di decollo e atterraggio e questo potrebbe causare dei guasti nel caso le saldature fossero precarie.
Il sensore barometrico non è proprio di facile reperibilità ma una ricerca su internet vi permetterà di rintracciare diversi distributori della Fujikura.
Il codice per programmare il microprocessore può essere scaricato dall'area files ma in caso di difficoltà è anche possibile richiedere il microprocessore già programmato direttamente all'autore.
E' importante che l'interno del vano nel quale viene installato l'altimetro non sia ermetico, in quanto la pressione interna deve equivalere a quella esterna.
Per ottenere questo è necessario praticare dei fori sul perimetro del vano payload, in una zona non disturbata da turbolenze, come potrebbe essere quella prossima all'ogiva.
La cosa migliore sono tre fori da 4 o 5 mm di diametro angolati di 120 gradi, ad almeno 100 mm dall'inizio della sezione cilindrica del razzo.
SISTEMI DI ESPULSIONE
Esistono diversi metodi per espellere il paracadute dal razzo:
Il più semplice, usato soprattutto sui modelli di piccole dimensioni, consiste nel far esplodere una micro carica di polvere nera che serve a pressurizzare il vano contenente il paracadute ed eiettarlo all'esterno previa separazione dell'ogiva.
La quantità di polvere nera generalmente usata è di un grammo o anche meno, a seconda del volume interno da pressurizzare.
La reperibilità della polvere (usata per le armi ad avancarica da collezione, che negli USA chiamano FFFF o 4F) è piuttosto difficoltosa in quanto per acquistarla presso le armerie è necessario essere in possesso del porto d'armi.
Questa polvere sviluppa una enorme quantità di gas, ed è abbastanza "lenta"; per questi motivi viene usata per la pressurizzazione dei volumi.
L'altra soluzione sarebbe quella di prepararsela da soli ma la procedura richiederebbe dei requisiti di sicurezza non in possesso dello sperimentatore amatoriale.
Possiamo invece accennare al funzionamento degli accenditori elettrici (e-match) che vengono usati per attivare la carica.
Si tratta di dispositivi composti da un sottile filamento di nikelcromo che sottoposto ad una corrente elettrica diventa incandescente.
Il calore prodotto è sufficiente ad innescare la combustione della polvere nera o dell'apposito materiale pirogeno che circonda il filamento.
Un metodo molto semplice è quello di fissare sui terminali di una coppia di fili isolati in plastica (va benissimo il filo citofonico) uno spezzone lungo qualche millimetro di capillare in nikelcromo, recuperato ad esempio da una resistenza elettrica di bassa potenza.
Una soluzione alternativa è quella di rompere la punta di una lampadina per alberi di natale funzionante a bassa tensione (3 volt) ed introdurla nella polvere nera, raccolta in un sacchetto di carta.
Per i razzi di maggiori dimensioni vengono usati dei dispositivi di espulsione basati su principi diversi, come ad esempio l'apertura di portelli e l'espulsione meccanica per mezzo di molle.
In questo caso l'impulso di comando servirà ad attivare dei servomotori o dei meccanismi elettromagnetici.
In qualsiasi caso, la sorgente di energia per l'accensione o attivazione dovrà essere fornita esternamente al circuito dell'altimetro, in quanto i mosfet agiscono da semplici interruttori e la microbatteria di alimentazione non è in grado di erogare forti correnti.
E' perciò necessario prelevare l'alimentazione da una batteria da 9 volt, alcalina.