C1P8
La replica del mitico robot di Guerre stellari
26/04/2009
Se vi state chiedendo se questa sigla vi ricorda qualcosa... ebbene si, è proprio Lui :
il robot di Guerre Stellari C1P8 - R2D2

Per la serie "Archeologia Tecnoinformatica" ecco a voi... C1P8, replica del mitico robot di Star Wars.
Premessa
Questo progetto è stato da me realizzato nella notte dei tempi, con le tecnologie disponibili negli anni '80.
Per la redazione di questo articolo ho scannerizzato le foto scattate a suo tempo (per ovvi motivi di qualità non eccelsa) e polverosi ricordi di un progetto indimenticato ma ormai reso evanescente dagli anni trascorsi.
La nascita
Correva l'anno 1977 e nelle sale cinematografiche usciva "Star Wars", film con il quale George Lucas ha lasciato un ricordo indelebile nella storia del cinema.
Immediatamente mi innamorai della tecnologia futuristica presentata nel film, delle navi spaziali, delle spade laser ma in particolare dei robot.
Questi infatti, al contrario degli automi fin'ora visti al cinema, avevano qualcosa di più: una personalità e un'anima. Facevano veramente parte del cast di attori e non erano semplici comparse.
Il mio preferito fu proprio C1P8, che nella versione originale USA si chiamava R2D2.
Decisi allora che NE VOLEVO UNO!
In questo modo iniziò l'avventura di procurami informazioni, disegni, schemi, dimensioni e materiale da cui "plasmare" il robot.
A quei tempi INTERNET era ancora in fasce, in italia non esistevano punti di accesso e i siti in rete si contavano su una mano.
Dovetti perciò arrangiarmi saccheggiando riviste e pubblicazioni varie nelle biblioteche e librerie.
Raccolsi così un pò di materiale fotografico da cui ricavare dei disegni dettagliati del robottino in questione e cominciai a pensare alla costruzione.
Il robot originale usato nei film (in realtà ne costruirono alcune copie con funzioni diverse) all'interno aveva assai poco di tecnologico.
Era infatti animato da un attore nano, un inglese di nome Kenny Baker. Il suo compito era quello di comandare l'avanzamento delle ruote, di girare la cupola e di azionare il piccolo braccio meccanico oltre ad alcuni sportelli.
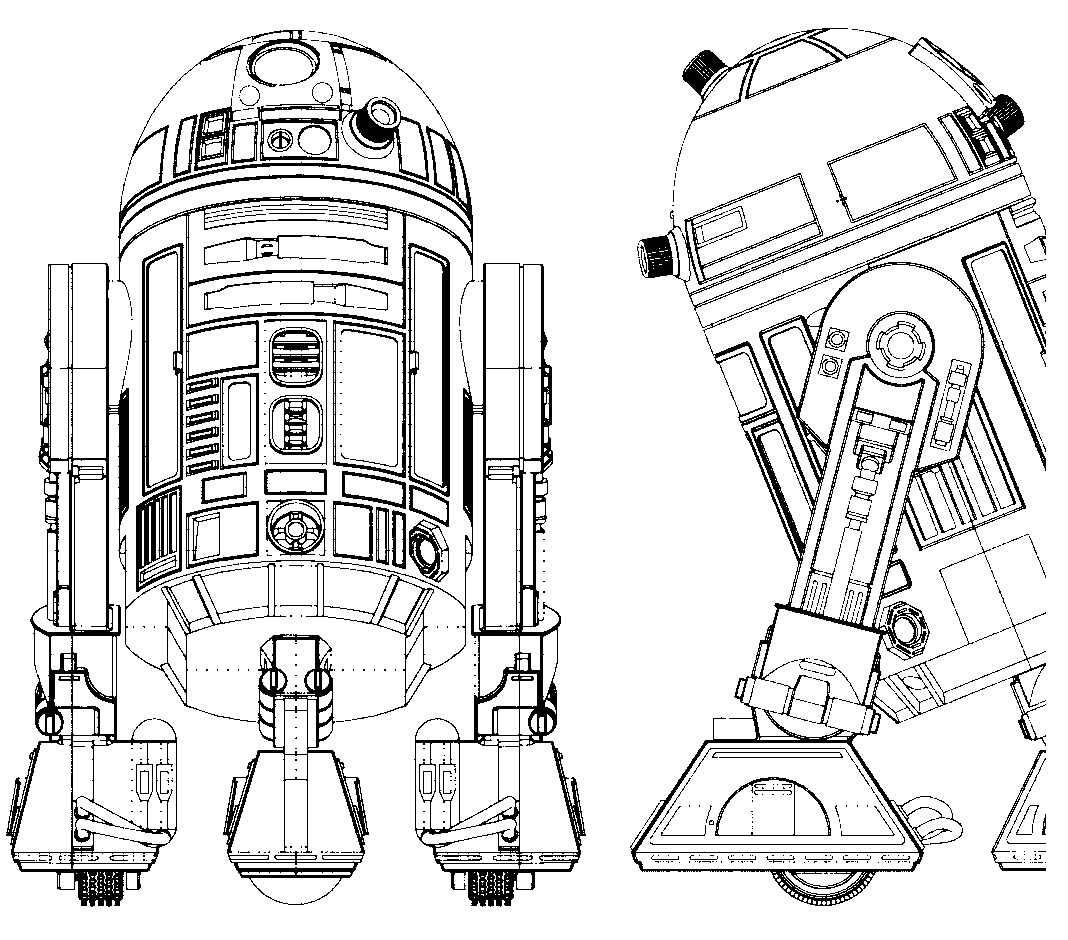
Disegni originali del robot

Foto del robot R2D2 originale

Foto della mia replica
Non avendo a disposizione un nano compiacente, il mio robot avrebbe dovuto incorporare dei servomeccanismi che svolgessero quelle funzioni, rendendolo paradossalmente più "autentico" dell'originale.
Il primo obiettivo era quello di reperire i componenti basilari del robot, ovvero motori, servomeccanismi, cuscinetti e soprattutto la struttura esterna.
Ovviamente per ques'ultima non trovai nulla di adatto e dovetti mettermi al lavoro con la fibra di vetro, con la quale avevo già una certa esperienza.
Realizzai così degli stampi in polistirolo, sagomando con molta pazienza dei fogli da 5 cm di spessore con la tecnica del filo caldo e poi incollandoli tra di loro per comporre dei blocchi.
Usai gli stampi formatori così ottenuti, dopo averli stuccati, levigati, verniciati e cerati, come matrice femmina per la laminazione della vetroresina.
Poichè il polistirolo non andava molto d'accordo con la resina poliestere (che contiene solventi in grado di distruggerlo), dovetti usare esclusivamente resina epossidica (molto costosa).
In questo modo realizzai il corpo a barilotto del robot (unendo due semicilindri), la cupola emisferica superiore, le "gambe" laterali, e le "scarpe" tronco-piramidali contenenti i motori di avanzamento.
L'assemblaggio avvenne usando come supporto una struttura metallica in tubi saldati, un telaio abbastanza robusto da sostenere i vari elementi.
Sul corpo centrale furono ricavati diversi sportelli apribili e pannelli removibili per le future espansioni.
In questo modo avrei potuto ampliare le funzioni del robot senza dover interventire drasticamente sulla struttura di base.
La cupola girevole era montata su un'asse girevole in modo da poter ruotare su se stessa, azionata da un motoriduttore.
La parte posteriore era accessibile tramite un grande sportello per poter intervenire all'interno senza difficoltà.
In questa zona fu installata anche la mother board del computer di controllo (vedi oltre).
I motori di avanzamento furono ricavati dalla meccanica di due alzacristalli automobilistici, reperiti a basso costo da uno sfasciacarrozze.
Altri servomeccanismi furono realizzati usando come base gli azionatori delle serrature delle portiere.
Le tre ruote (due motrici e una pivottante) furono recuperate da un carrello da supermercato in disuso.
Dovetti ovviamente costruire da zero l'asse cuscinettato su cui farle scorrere e al cui lato era fissato il gruppo motoriduttore.
La ruota anteriore era invece libera di ruotare insieme a tutto lo "zoccolo" che faceva da carenatura.
La sorgente di alimentazione erano due batterie da moto a 12V 18Ah installate nella parte inferiore del corpo centrale per abbassare il baricentro e dare stabilità al robot.
L'altezza totale era di 96 cm, esattamente come l'originale, il diametro del corpo cilindrico era di 38 cm e il peso complessivo era di poco superiore ai 35 Kg (accumulatori compresi).
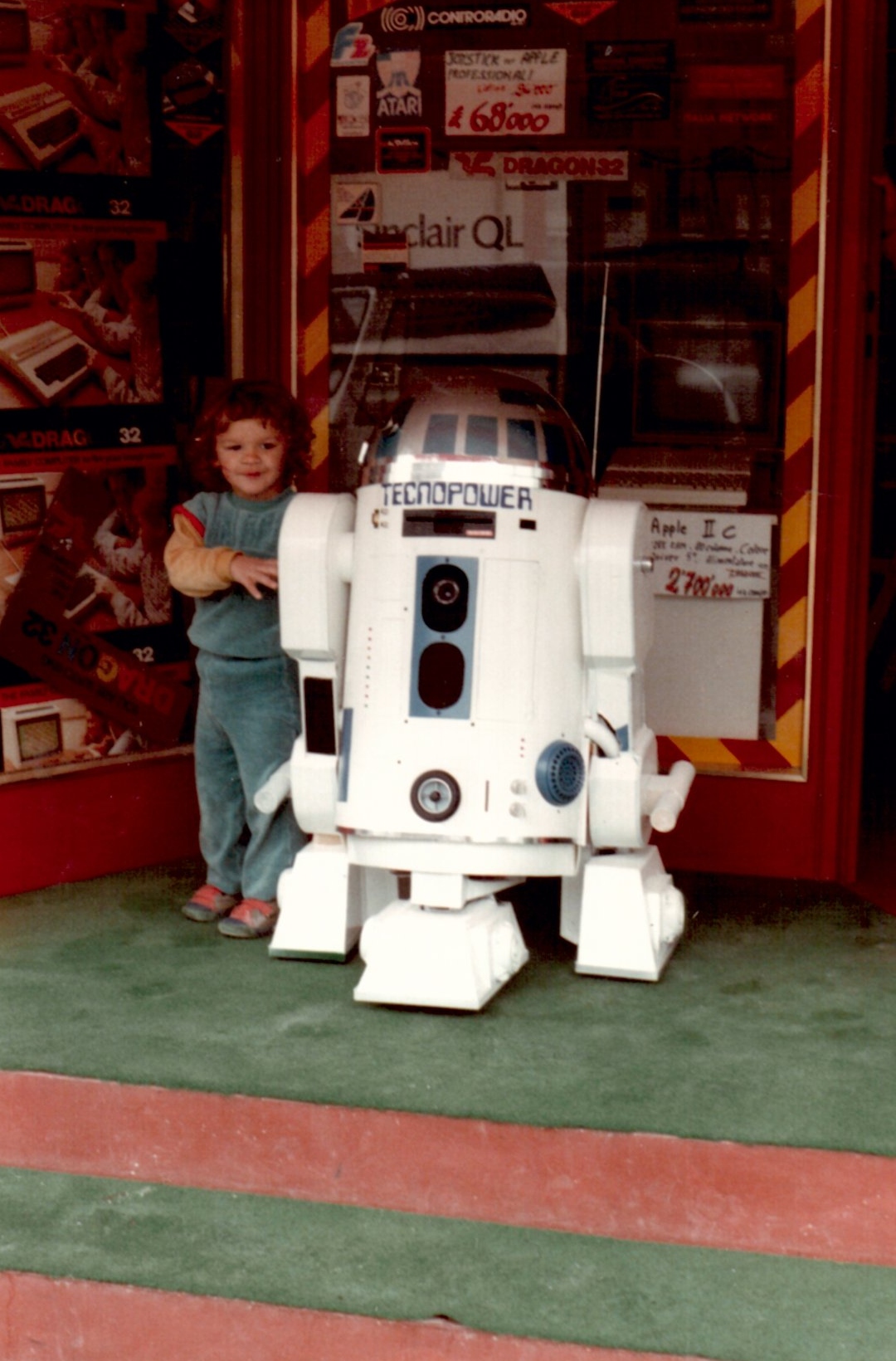
Il mio C1P8 con mio figlio (che allora aveva tre anni)
Le movimentazioni:
Il mio C1P8 svolgeva molte delle funzioni dell'originale, escluse solo l'estrazione del carrello anteriore e l'articolazione delle "braccia" laterali, che erano fisse.
Poteva spostarsi a piacimento in ogni direzione (anche in modo automatico), ruotare la cupola, accendere in diversi colori la spia quadrata presente sulla stessa, aprire alcuni sportelli, muovere una pinza rudimentale, estrarre un'antenna telescopica ed infine "parlare" con i tipici pigolii del robot originale.
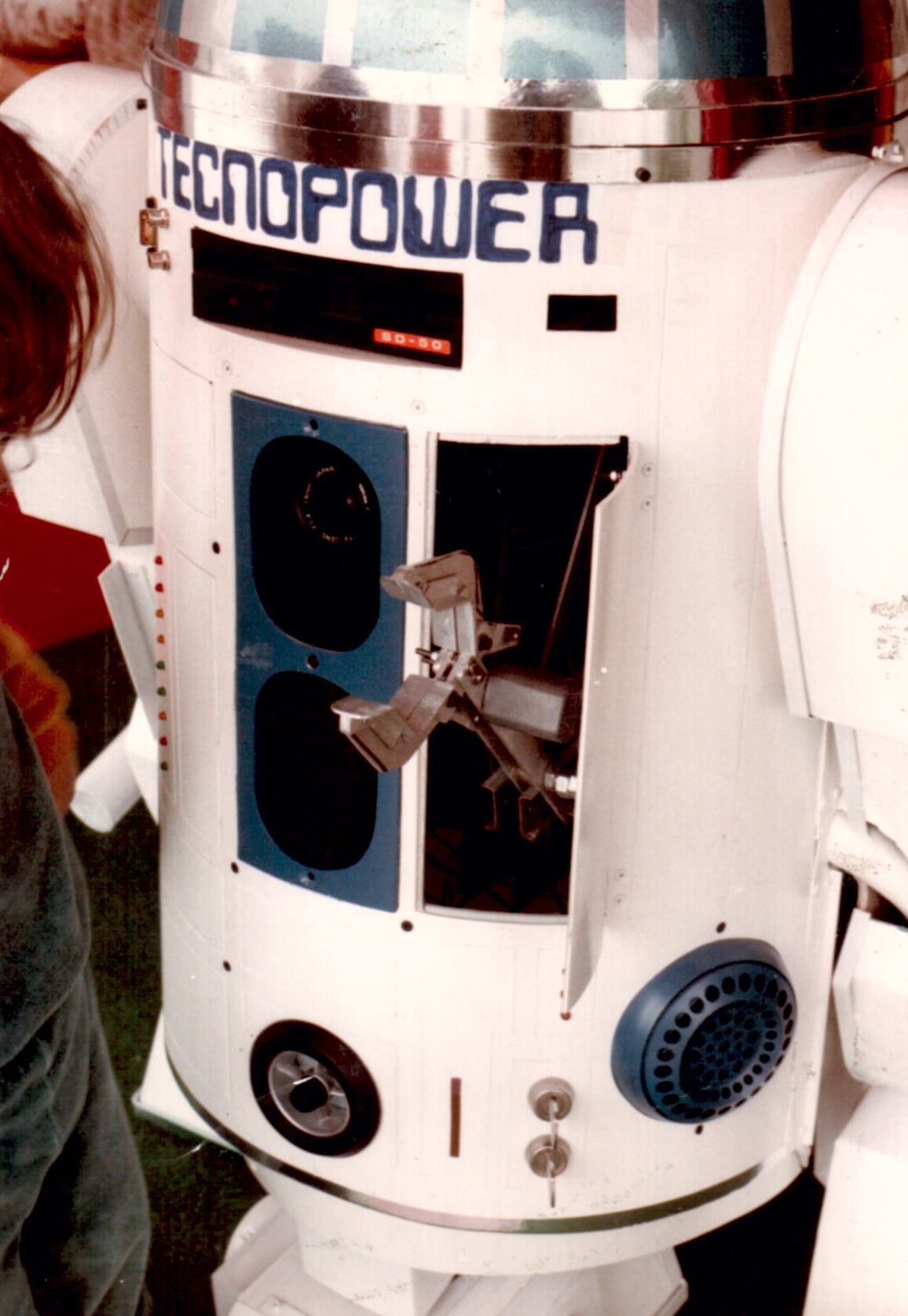
Particolare del braccio meccanico
Vediamo ora come tutte queste funzioni furono implementate:
Il sistema di controllo:
Il robot poteva avere due modi operativi:
Il controllo remoto tramite radiocomando oppure seguire una programmazione predefinita gestita da un computer di bordo.
Il controllo remoto:
Il sistema di radiocomando era realizzato con una radio per aeromodellismo a 8+2 canali proporzionali.
I canali usati erano: due per i motori di avanzamento (destra / sinistra), uno per la rotazione della cupola e uno per lo sportello anteriore (per l'uscita delle pinza).
In alternativa lo stesso comando attivava la "voce".
Sul pannello anteriore era installata una telecamera in bianco e nero (a tubo, le CCD non erano ancora disponibili) che per mezzo di un trasmettitore audio/video in banda VHF inviava il segnale ripreso alla stazione di controllo.
Questo permetteva di comandare il robot da un furgone parcheggiato nei pressi in modo che l'operatore non fosse in vista, naturalmente per aumentare il realismo.
Il segnale audio raccolto dal robot era riprodotto dal monitor della stazione di controllo in modo da permettere l'ascolto dei commenti del pubblico.
Questa modalità era usata soprattutto all'aperto o nelle fiere, dove il robot si faceva una passeggiata in mezzo alla gente suscitando meraviglia e curiosità.
Soprattutto i bambini si mostravano entusiasti per un giocattolo più grande di loro ed apparentemente dotato di vita propria.
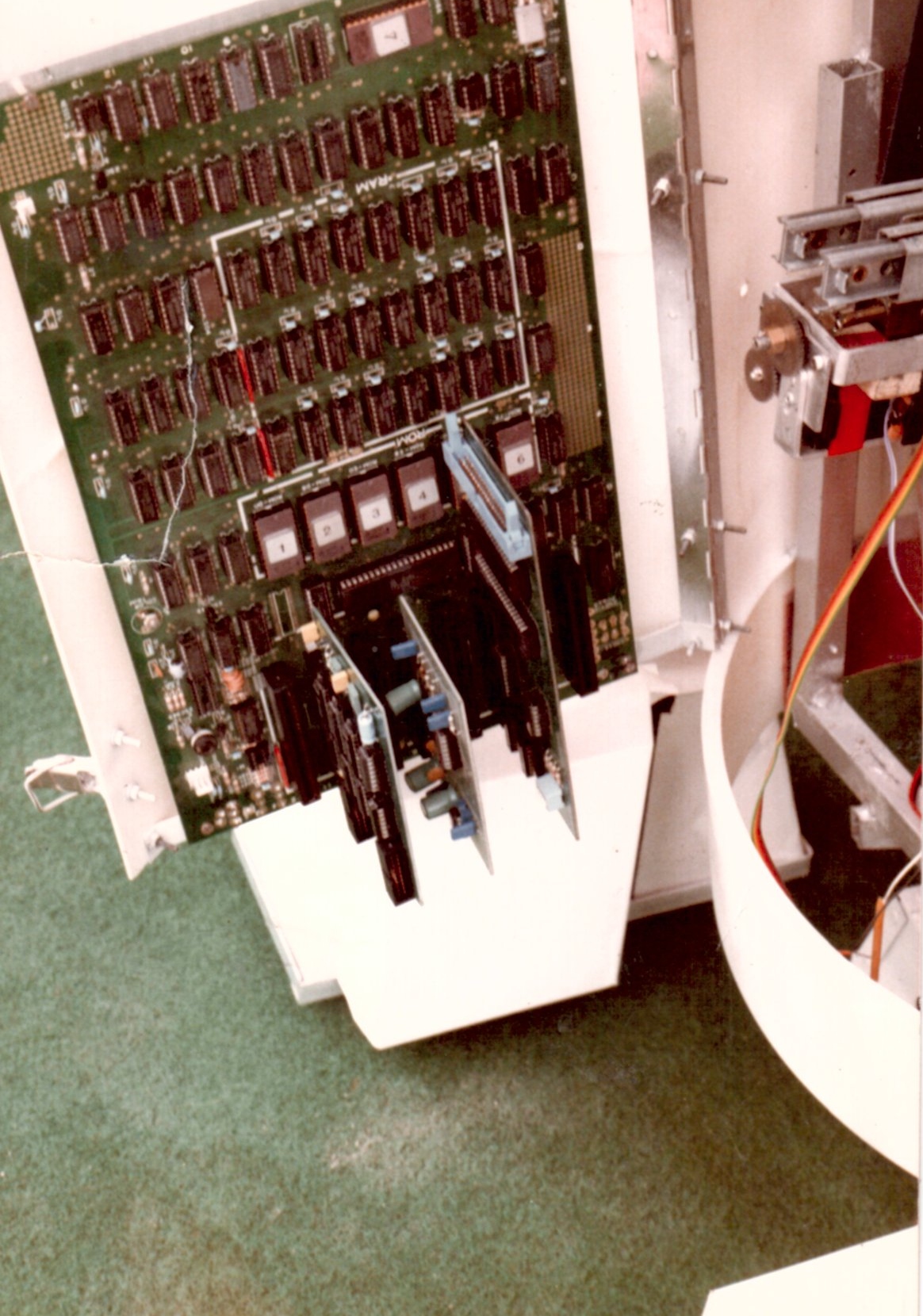
Particolare dell'elaboratore Apple II montato sullo schienale posteriore.
Si possono notare alcune delle schede di interfaccia.
Il sistema automatico:
ll robot era in grado di seguire un percorso predefinito riconoscendo una pista in nastro adesivo nero applicata al pavimento. Qualcosa di molto simile al sistema usato dagli odierni micro-robot "line-follower".
In più era in grado di riconoscere la posizione in cui si trovava ed eventualmente fermarsi o fare una pausa.
A questo scopo la pista in nastro era dotata di una coppia di barre laterali che erano riconosciute da altri due sensori ottici ausiliari.
In questa modalità il robot poteva raggiungere autonomamente una determinata posizione nella sua area operativa (ad esempio un palco oppure uno studio televisivo).
A quei tempi non esistevano i microcontroller e tutto il lavoro di elaborazione doveva essere svolto da uno dei primi veri "personal computer".
No, non stiamo parlando di un PC IBM, quelli sono venuti anni dopo.
ll cuore computerizzato del robot era un APPLE II, per l'esattezza un clone prodotto da una piccola ditta artigianale friulana, della quale ero concessionario.
Per quella piattaforma (in quell'epoca, avanzatissima e sofisticata) erano state sviluppate molte schede di INPUT-OUTPUT, tra cui anche una di controllo relè.
I sensori a fotoresistenza erano interfacciati all'elaboratore e un programma appositamente scritto gestiva le movimentazioni.
Non esistendo ancora le memorie a stato solido e neppure gli Hard Disk (incredibile vero?), il programma veniva caricato da un floppy disk da 5"1/4 montato sul pannello anteriore.
Questo richiedeva qualche minuto di "inizializzazione" prima di poter operare.
Il sistema operativo era incorporato del firmware del computer, così anche l'interprete Basic, linguaggio appunto usato per la programmazione.
Il sorgente veniva caricato dal floppy disk (da 100 Kbyte, se ricordo bene) ed interpretato direttamente senza bisogno di lunghe compilazioni (quasi come Windows ;)
L'alimentazione era fornita dagli accumulatori ricaricabili di bordo e stabilizzata e filtrata da un apposito circuito, in modo che le spurie generate dai motori non potessero interferire.
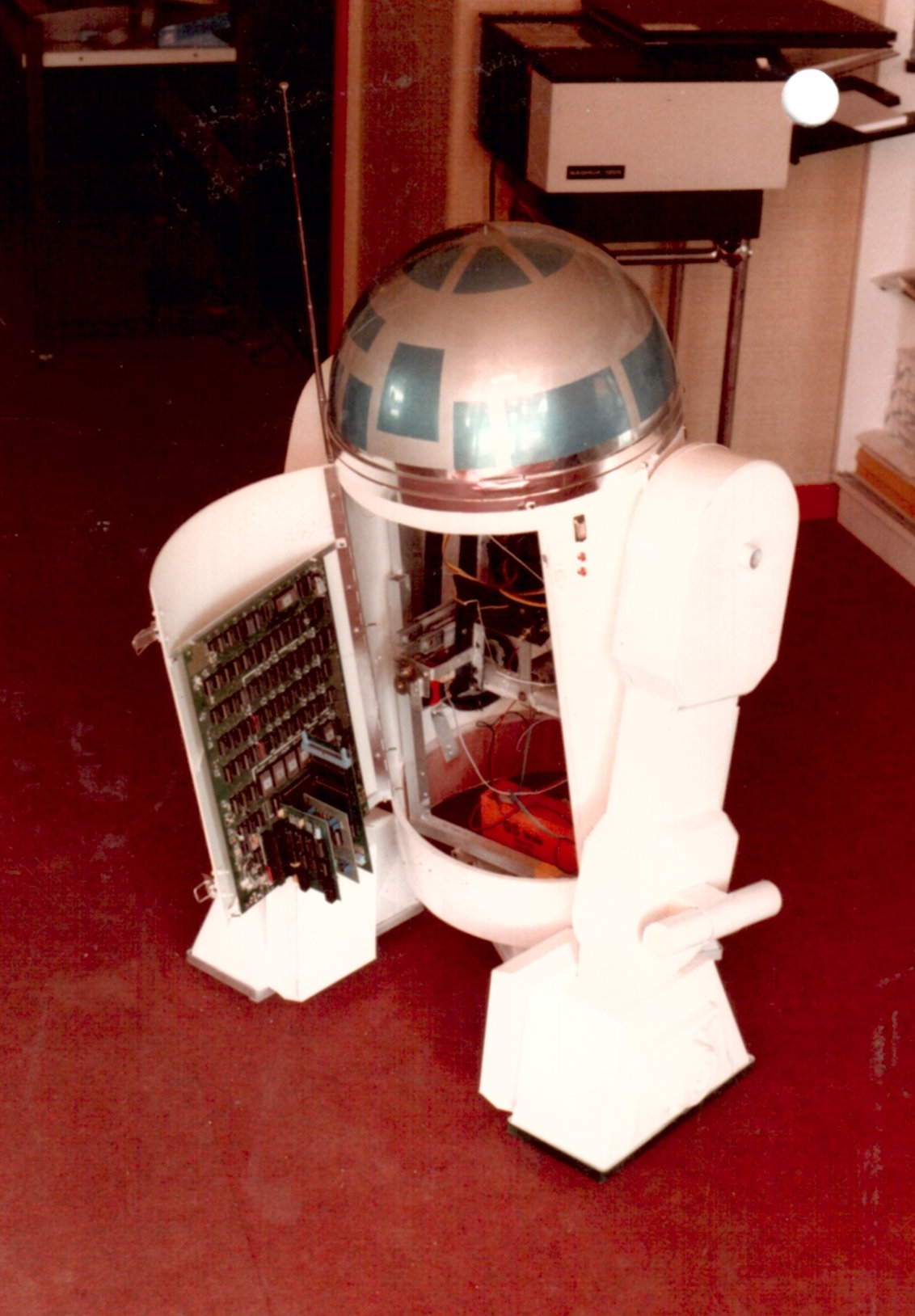
Vista della parte posteriore con l'elaboratore Apple
L'equipaggiamento radio:
Oltre al ricevitore per il radiocomando aeromodellistico, a bordo del C1P8 c'era un trasmettitore VHF per i segnali video e audio provenienti dalla telecamera e il microfono.
Il sistema era interamente autocostruito e le prestazioni non erano eccezionali, infatti il segnale ricevuto era abbastanza disturbato e spesso slittava di frequenza costringendo l'operatore a risintonizzare il ricevitore.
Faceva comunque il suo lavoro e non è mai stato sostituito.
Erogava circa 200 mW in antenna ed aveva un portata di soli 200 metri. Questo è giustificato dal fatto che usava una frequenza nella banda bassa televisiva, poco usata ma soggetta a varie limitazioni.
Il segnale era ricevuto dalla stazione di controllo con un televisore portatile da 12 ".
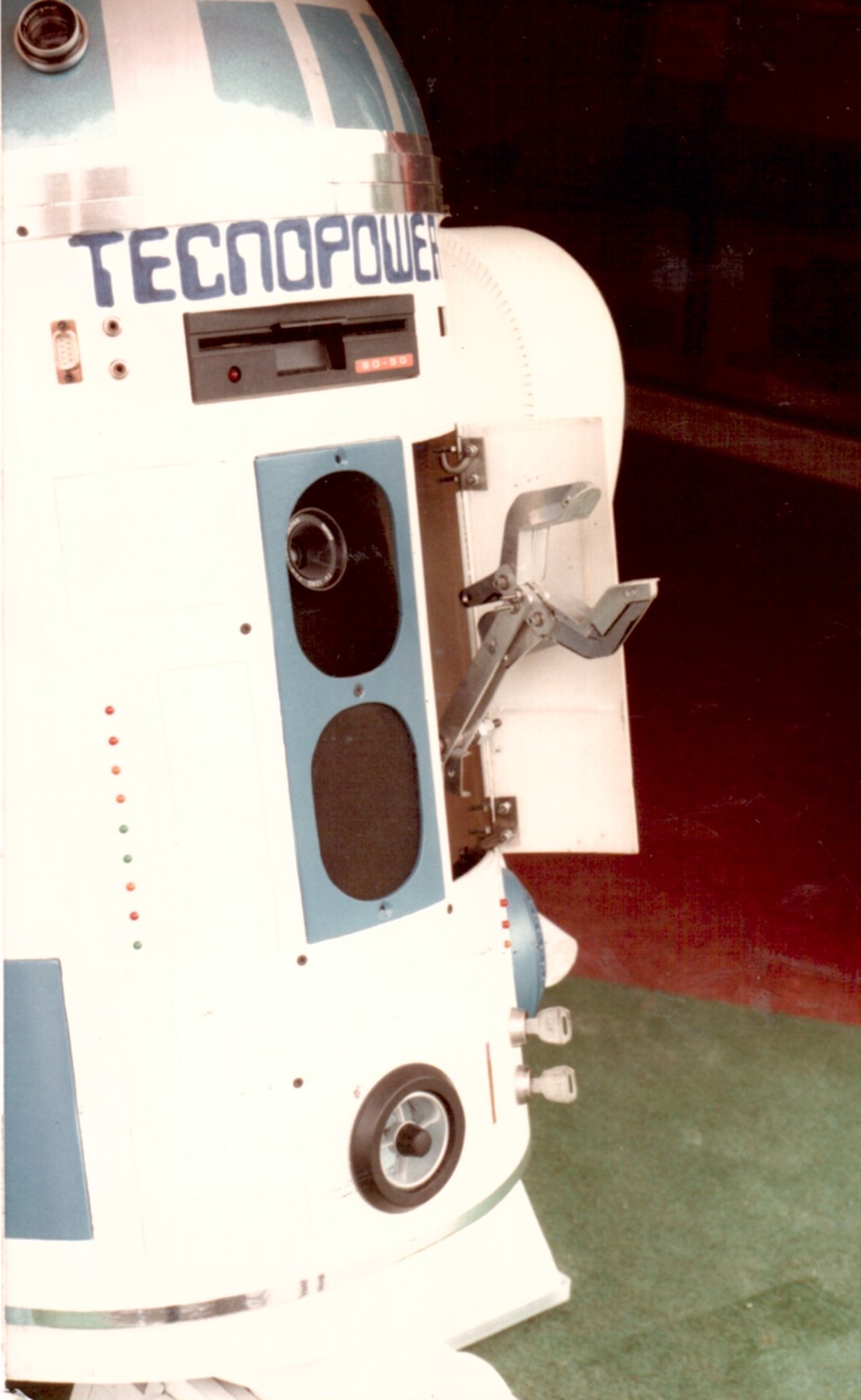
Uno degli sportelli anteriori con la pinza estratta
La "voce"
Non essendo disponibili le moderne schede di sintesi audio, la voce del robot era generata da un dispositivo costruito appositamente.
Si trattava di un "sequencer" analogico programmato per imitare i fischi e le pernacchie del robot originale.
Lo schema era un'accozzaglia di VCO, VFC, ADSR e VCA messi insieme quasi a casaccio, mentre il sequencer era formato da un registro a scorrimento che inviava le tensioni di controllo programmate tramite trimmer.
Era attivato casualmente da un interruttore al mercurio installato sulla scheda oppure da un comando esterno fornito dal radiocomando.
I suoni emessi non avevano alcun senso ma l'effetto era comunque stupefacente.

Il robot in esposizione nella vetrina del mio negozio

il sottoscritto durante la costruzione del robot
(allora avevo ancora tanti capelli)
La vita operativa del robot
Il robot è rimasto in funzione per diversi anni ed ha partecipato come attrazione in molte fiere nazionali ed anche ospite in programmi televisivi ed eventi in varie discoteche della regione.
In quegli anni avevo un negozio di computer e il marchio ben visibile sul robot è stato un'ottima pubblicità.
Poi la novità è finita e ho deciso di concludere la sua attività promozionale.
Oggi i suoi resti mortali sono ancora nel mio laboratorio ma probabilmente un giorno deciderò di resuscitarlo (pardon, riattivarlo).
Aggiornamento: il robot è stato restaurato qualche anno fa, in un'altra pagina di questo sito si possono vedere i risultati.